周期時変システムの数理モデル化に関する基礎理論の構築

(ポイント)
-
周期時変システムを高精度にモデル化する基礎理論を新たに構築した
-
既存の時不変系へのシステム同定論を拡張することで、より高精度な数理モデルを簡単に導出することが可能になった
-
自動運転システムなどのマルチレートセンサ系への展開が期待される
(概要説明)
熊本大学大学院 先端科学研究部 岡島寛准教授らは、周期時変システムに対する高精度な数理モデル化に関する研究成果を発表しました。
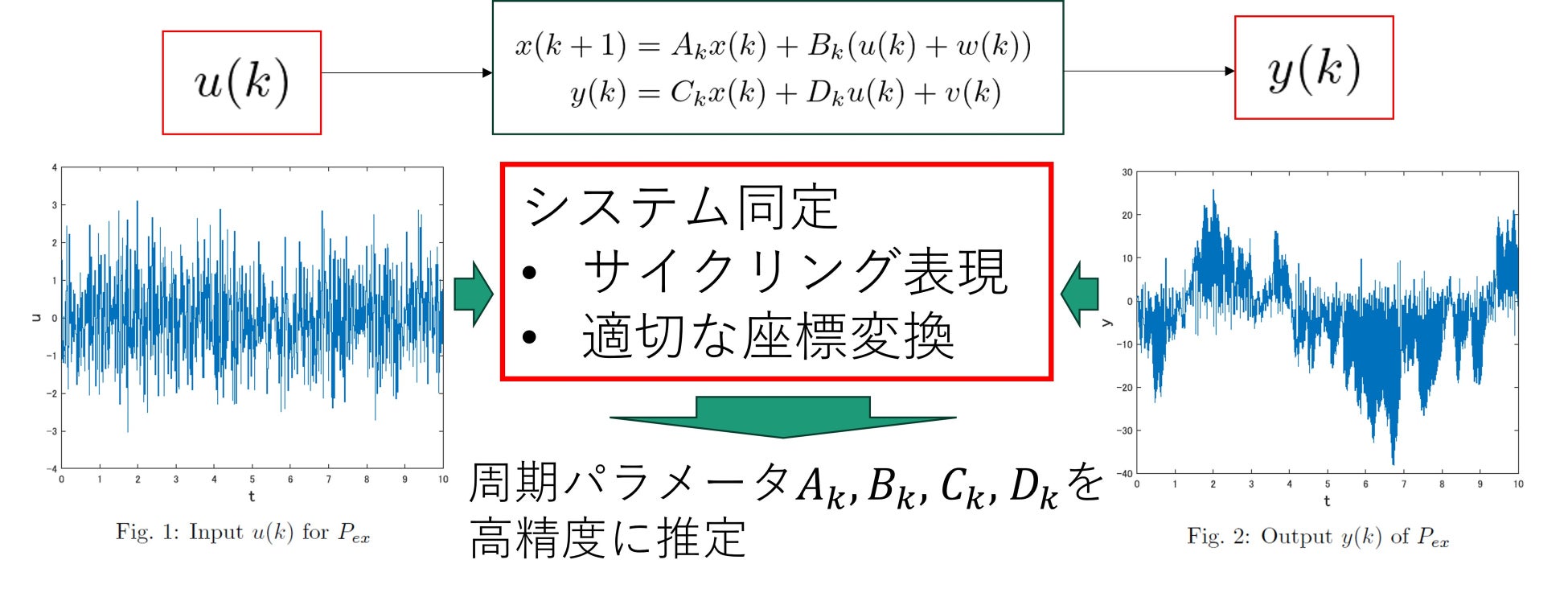
本研究では、周期時変システムの数理モデルを導出するシステム同定アルゴリズムを提案しています。時不変化手法の一つである「サイクリング」を利用することで、線形時不変系に対する既存のシステム同定法を適用し、さらにマルコフパラメータに関する性質を利用した座標変換によって周期時変システムのモデルパラメータを導出します。本研究成果は、「IEEE ACCESS」に2025 年1 月30 日に掲載されました。
[背景]
制御工学分野やAI 分野などでは、扱う対象の数理モデルに基づいて各種設計がなされます。数理モデルを正確に求めることは、制御を適切に行う上で有用です。数理モデルの導出には、入力データと出力データを用いてシステムの動作を表すモデルを導出する「システム同定理論」を用いることが一般的です。この理論は、システムの特性が時間によって変化しない、線形時不変系と呼ばれる汎用的な対象を扱える枠組みでは広く研究されており、システム同定理論に基づいて数理モルを得ることは比較的容易です。しかし、対象が、システムの特性が時間とともに周期的に変化する周期時変系と呼ばれるシステムになった場合、モデルの導出が極めて困難になります。従来、周期信号を利用したモデル化手法などが提案されていましたが、理想的な環境下での推定であっても精度が良くありませんでした。
周期時変システムの例としては、周期軌道を描く宇宙機などが挙げられます。また、自動運転車や産業ロボットのように複数の計測周期を持つマルチレートセンサ系も周期時変システムに該当し、このような対象の数理モデル化は、複雑な制御を実現するために必要不可欠です。
[成果]
本研究では、周期時変システムを時不変システムとして扱える「サイクリング」と呼ばれる手法を利用しています(図1)。サイクリング手法は2000 年以前に提案されていますが、システムの次元が周期倍に増加することもあり、これまであまり活用されていませんでした。本研究では、まず、サイクリング表現された周期時変システムのマルコフパラメータに関する重要な性質を導きました。この導いた性質を活用することで、状態空間表現されたモデルを適切に座標変換し、元の周期時変システムに対する数理モデルを構築します。従来の手法とは異なり、周期信号を利用しないため、簡単に数理モデル化が可能となります。結果はMATLAB シミュレーションにより検証し、高精度なモデルが得られることを確認しています。
[展開]
背景で述べたように、マルチレートセンサ系では入出力の組を直接入手できない
ため、本研究の手法をそのようなシステムの数理モデル化に応用することも可能
です。数理モデルが与えられていることを前提とした設計理論は数多く存在する
ため、数理モデルを高精度に求める本研究の成果は、工業分野や科学技術分野
における技術力・研究力の向上に寄与することが期待されます。
(論文情報)
論文名:Cyclic Reformulation Based System Identification for Periodically Time-varying Systems
著者:岡島寛,藤本悠介,奥宏史,近藤晴人
掲載誌:IEEE ACCESS (オープンアクセス誌)
URL:https://ieeexplore.ieee.org/document/10858707
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像