日本初のみちびき(準天頂衛星システム)を利用した案内ロボットで5Gを活用した実証実験を開始
~5G×ロボットの社会実装に向けて~
ハウステンボス株式会社(以下、ハウステンボス)、国立大学法人九州大学(以下、九州大学)、株式会社リビングロボット(以下、リビングロボット)、株式会社NTTドコモ九州支社(以下、ドコモ)は、みちびき※1を利用した案内ロボットで第5世代移動通信方式※2(以下、5G)を用いた実証実験(以下、本実証実験)を九州大学伊都キャンパスにて実施します。
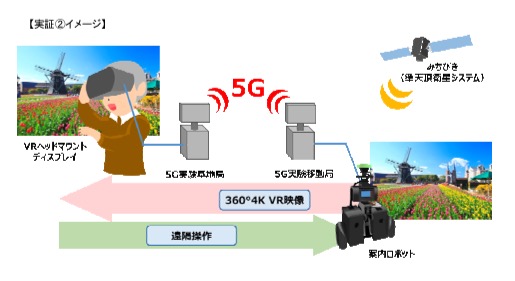
九州大学とリビングロボットが開発した案内ロボットは、みちびきのセンチメータ級測位補強サービスCLAS※3を利用した日本初となる屋外サービスロボットです。本実証実験においては、案内ロボットサービス提供に必要な遠隔監視や、ロボットに搭載した全方位4Kカメラによる映像の取得とロボットの遠隔制御を、5Gを通じて実現します。
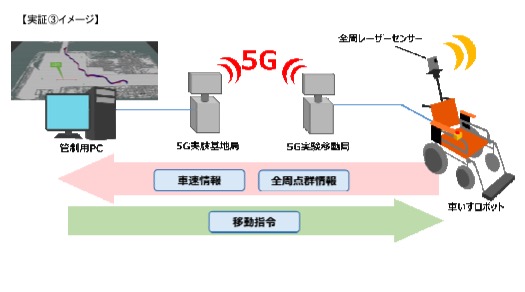
また全周レーザーセンサー※4を搭載した車いすロボットでは、レーザーセンサーで取得した大量の点群データを5Gで遠隔にあるPCに送信し、高速に処理されたデータを使って車いすロボットを誘導します。これにより、テーマパークといった広大な園内や街中の案内や巡回監視の自動化、遠隔地から街中を自由に散策できる分身ロボットを、移動困難者に対する自動運転パーソナルモビリティビークル(1人乗りコンパクト移動支援機器)としての利用が期待できます。
本実証実験を通じて得られた結果をもとにロボットの改善を図り、今後はハウステンボスでの実証実験を開始する予定です。九州大学、リビングロボット、ハウステンボス、ドコモは、本実証実験を通じてロボットの社会実装における有効性を評価するとともに、ロボットが社会貢献できる未来の実現に取り組んでまいります。
※1.みちびき(準天頂衛星システム)とは、準天頂軌道の衛星が主体となって構成されている日本の衛星測位システムのことで、英語ではQZSS(Quasi-Zenith Satellite System)と表記します。
※2.ドコモは、2019年9月にプレサービス、2020年春に本格商用サービスとして提供開始をめざしております。
※3.センチメータ級測位補強サービスCLAS(Centimeter Level Augmentation Service)とは、内閣府が整備するみちびき(準天頂衛星システム)から日本全国に無償で配信される高精度測位値を得るための測位補強情報のことです。本実証実験においては受信機提供等にて三菱電機株式会社に協力をいただいています。
※4.全周レーザーセンサーとは、センサーヘッドが回転しながら360度方向に一度に32本のレーザーを走査し、障害物までのレーザーの到達時間から距離を計測するセンサーです。一秒間に約700,000点の距離が計測できます。
◆本実証実験概要◆
1.概要
・実証実施日:2019年3月19日(火)
・実証場所:九州大学伊都キャンパス ウエスト2号館
・実証内容:案内ロボットと5Gを用いた、園内・街中案内ロボットサービス提供に向けた基礎実証
2.各社の役割
九州大学
・大学院システム情報科学研究院 倉爪教授が開発した実空間ロボット制御技術の提供
・案内ロボット開発
・本実証実験フィールド提供
リビングロボット
・案内ロボット開発
ハウステンボス
・案内ロボット開発における知見及びアドバイス提供
・今後の実証フィールド提供
ドコモ
・5G実証環境提供
九州大学とリビングロボットが開発した案内ロボットは、みちびきのセンチメータ級測位補強サービスCLAS※3を利用した日本初となる屋外サービスロボットです。本実証実験においては、案内ロボットサービス提供に必要な遠隔監視や、ロボットに搭載した全方位4Kカメラによる映像の取得とロボットの遠隔制御を、5Gを通じて実現します。
また全周レーザーセンサー※4を搭載した車いすロボットでは、レーザーセンサーで取得した大量の点群データを5Gで遠隔にあるPCに送信し、高速に処理されたデータを使って車いすロボットを誘導します。これにより、テーマパークといった広大な園内や街中の案内や巡回監視の自動化、遠隔地から街中を自由に散策できる分身ロボットを、移動困難者に対する自動運転パーソナルモビリティビークル(1人乗りコンパクト移動支援機器)としての利用が期待できます。
本実証実験を通じて得られた結果をもとにロボットの改善を図り、今後はハウステンボスでの実証実験を開始する予定です。九州大学、リビングロボット、ハウステンボス、ドコモは、本実証実験を通じてロボットの社会実装における有効性を評価するとともに、ロボットが社会貢献できる未来の実現に取り組んでまいります。
※1.みちびき(準天頂衛星システム)とは、準天頂軌道の衛星が主体となって構成されている日本の衛星測位システムのことで、英語ではQZSS(Quasi-Zenith Satellite System)と表記します。
※2.ドコモは、2019年9月にプレサービス、2020年春に本格商用サービスとして提供開始をめざしております。
※3.センチメータ級測位補強サービスCLAS(Centimeter Level Augmentation Service)とは、内閣府が整備するみちびき(準天頂衛星システム)から日本全国に無償で配信される高精度測位値を得るための測位補強情報のことです。本実証実験においては受信機提供等にて三菱電機株式会社に協力をいただいています。
※4.全周レーザーセンサーとは、センサーヘッドが回転しながら360度方向に一度に32本のレーザーを走査し、障害物までのレーザーの到達時間から距離を計測するセンサーです。一秒間に約700,000点の距離が計測できます。
◆本実証実験概要◆
1.概要
・実証実施日:2019年3月19日(火)
・実証場所:九州大学伊都キャンパス ウエスト2号館
・実証内容:案内ロボットと5Gを用いた、園内・街中案内ロボットサービス提供に向けた基礎実証

2.各社の役割
九州大学
・大学院システム情報科学研究院 倉爪教授が開発した実空間ロボット制御技術の提供
・案内ロボット開発
・本実証実験フィールド提供
リビングロボット
・案内ロボット開発
ハウステンボス
・案内ロボット開発における知見及びアドバイス提供
・今後の実証フィールド提供
ドコモ
・5G実証環境提供
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザーログイン既に登録済みの方はこちら
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
- 種類
- 商品サービス
- ビジネスカテゴリ
- テーマパーク・遊園地
- ダウンロード