ロボットアーム向け無線電力伝送システムの開発に成功
~制御レス無線電力伝送実現に向けた第一歩~
千葉大学大学院工学研究院の関屋大雄教授は、株式会社国際電気通信基礎技術研究所波動工学研究所、埼玉大学の大平昌敬准教授とともに、ロボット向け2ホップ(注1)2出力無線電力伝送システムの開発に成功しました。開発した無線電力伝送システムは、ロボットの関節部において無線で電力を送ることで、電力配線のねじれや摩耗による断線故障のリスクを軽減することができます。さらに、ロボットのモータ、センサの動きに対して特別な制御(注2)を用いることなく一定電圧を供給し続けることに成功しています。
この成果は、無線電力伝送システムにおいてその構造を簡素化するための基礎技術となり、今後の無線電力伝送システムの社会実装に向けて、多様なアプリケーションへの展開が期待されます。
本研究成果は電子情報通信学会電気通信エネルギー技術研究会にて発表します。
この成果は、無線電力伝送システムにおいてその構造を簡素化するための基礎技術となり、今後の無線電力伝送システムの社会実装に向けて、多様なアプリケーションへの展開が期待されます。
本研究成果は電子情報通信学会電気通信エネルギー技術研究会にて発表します。
- 研究背景
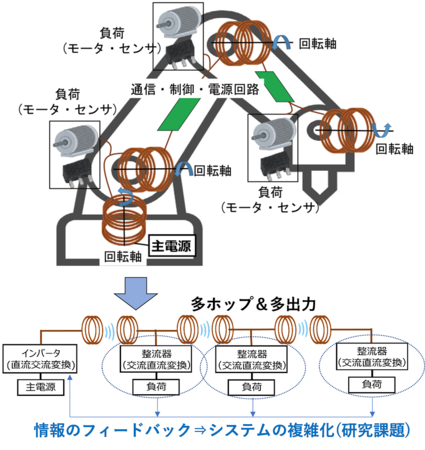 図 1:ロボット向け多ホップ多出力無線電力伝送システムの概念図
図 1:ロボット向け多ホップ多出力無線電力伝送システムの概念図
無線電力伝送においては、出力制御のための情報のやりとりも無線で行う必要があり、その伝送遅延(注3)による性能劣化が問題となっています。また、多出力システムではその制御のために多くの情報をやりとりする必要があり、システムの複雑性が増大してしまう問題もあります。
- 課題解決のアイディア
本研究では、一定の電圧を出力するロボットアーム向け多ホップ多出力無線電力伝送システムを開発しました。まず、負荷変動(注4)に対して一定出力と高い電力伝送効率注5)を制御装置を用いることなく常に実現する「負荷非依存動作」の設計論を構築しました。構築した設計論は低周波数からISM帯(注6)高周波数まで幅広く適用可能であり、高い一般性と汎用性を有しています。
この設計論に基づき、具体的に2ホップ2出力の6.78MHz無線電力伝送システムを設計し、実験結果から、負荷変動に対し一定出力と高効率を維持できることを確認しました(図2)。今後、多様なアプリケーション向けに、負荷非依存動作を搭載した無線電力伝送システムを設計できるようになります。
![図 2:実験による検証 ([下記発表2より転載] copyright(c)2021 IEICE)](/i/15177/529/resize/d15177-529-edb14d6c55b747646569-1.png) 図 2:実験による検証 ([下記発表2より転載] copyright(c)2021 IEICE)
図 2:実験による検証 ([下記発表2より転載] copyright(c)2021 IEICE)
- 今後の展望
- 用語解説
(注2)制御:ある目的(今回は一定電圧を維持すること)のために、システムに必要な操作を加えること。
(注3)伝送遅延:通信において情報を送るために必要となる時間。一般的に無線通信では有線と比較して非常に大きい伝送遅延が発生する。
(注4)負荷変動:電力供給の目的である電池やモータ、センサなどを「負荷」と呼ぶ。これら負荷は時々刻々と必要電力量が変化し、そのことを負荷変動と言う。
(注5)電力伝送効率:電力伝送の仮定における電力損失量を量る指標。高いほど損失量は小さい。
(注6)ISM帯周波数:Industrial Scientific and Medical Bandの略。6.78 MHz, 13.56MHz, 27.12MHzなど無線電力伝送にとっては設計が難しい高い周波数であるが、免許不要で利用できる利点がある。
- 研究プロジェクトについて
- 発表情報
2.多関節ロボットアームに向けた負荷非依存多出力マルチホップWPTシステム
著者:1.関屋大雄a,b・戸叶克輝b・グエン キエンa,b・清水 聡b,c・芹澤和伸c・佐久間和司c・鈴木義規c
2.戸叶克輝b・朱 聞起b・グエン キエンa,b・関屋大雄a,b
a 千葉大学大学院工学研究院 b 千葉大学大学院融合理工学府数学情報科学専攻 c(株)国際電気通信基礎技術研究所
雑誌名:電子情報通信学会電子通信エネルギー技術研究会 1.EE2021-13 2.EE2021-14
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザーログイン既に登録済みの方はこちら
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
- 種類
- 調査レポート
- ビジネスカテゴリ
- 電気・ガス・資源・エネルギー学校・大学
- ダウンロード
