日本初、MECに搭載したネットワーク遅延対策機能により、商用5Gで「物に触れた手応えが伝わるロボット」の安定的な無線遠隔操作に成功
~新規開発した通信制御システムで、ロボット無線遠隔操作の実用性を拡大~
株式会社NTTドコモ(以下、ドコモ)と慶應義塾大学ハプティクス研究センター(以下、慶大)は、慶大が開発したロボティクス技術 「リアルハプティクス®※1」を活用し、MECに搭載したネットワーク遅延対策機能とドコモの商用5Gのモバイルデータ通信を組み合わせ、繊細な力加減を必要とし物に触れた時の手応えが伝わるロボットの無線遠隔操作を安定した動作で行うことに、日本で初めて※2成功しました。今回の実証実験(以下、本実証)は、ドコモが開発したネットワーク遅延対策機能をdocomo MEC🄬※3に搭載し実現した日本初の取り組みです。



本実証で用いた技術で実現につながると期待されるユースケース
(左︓リハビリ施術のリモート化、中央︓危険な場所での作業のリモート化、右︓家事のリモート化)
ドコモと慶大は、これまでもリアルハプティクスを活用したさまざまな検証に取り組んできました※4。遠隔地にいる操作者に遠隔ロボットが物をつかんだ時の感覚を詳細に伝えるためには、操作ロボットと遠隔ロボットをつなぐモバイルデータ通信において、低遅延、かつ変動がない状態を保つ必要があります。しかし、モバイルデータ通信の遅延や変動が大きいと、2台の装置間で物をつかんだ感覚や動作が同期できなくなり、リアルハプティクスが得意とする力加減の再現が適切に行えなかったり、ロボット操作が困難になるという課題がありました。
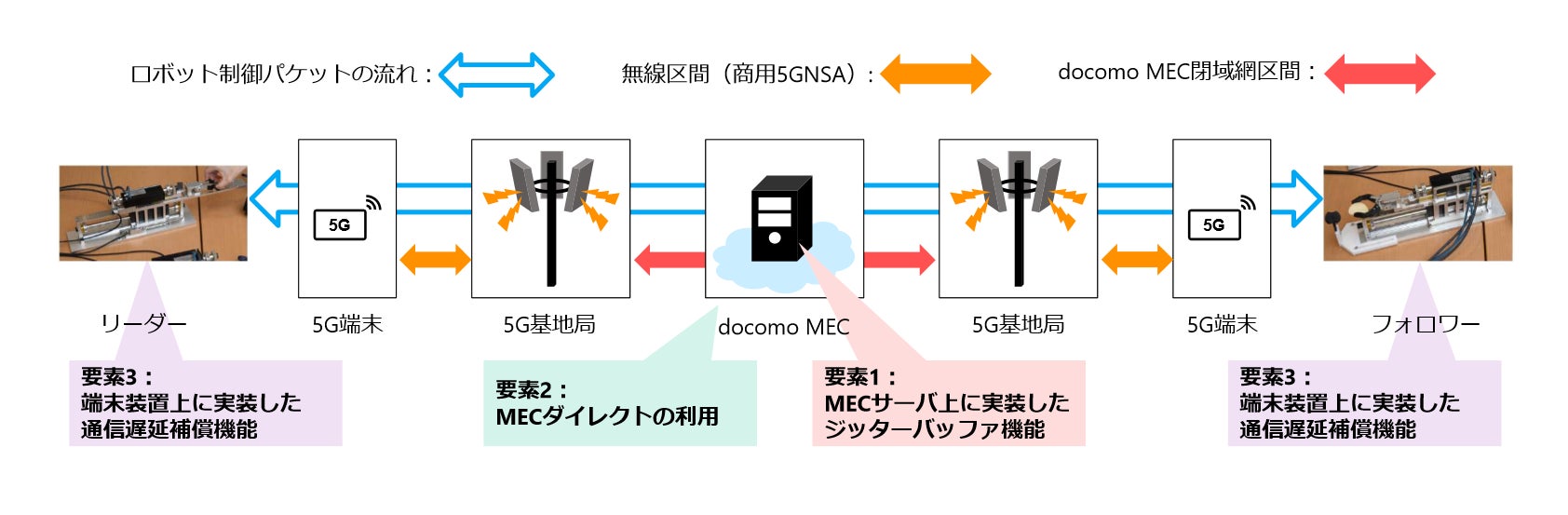
本実証では、モバイルデータ通信の遅延や変動を抑えるためにドコモが開発したジッターバッファ機能と、docomo MECのMECダイレクト®機能※5、慶大が開発した通信遅延補償機能の3つの技術を組み合わせ、モバイルデータ通信が遅延する環境であってもリアルハプティクスによる力加減の再現が適切に行えることや、ロボット操作が滑らかに問題なくできることを検証しました。
本実証により、ドコモが開発した通信制御システムとモバイルデータ通信を組み合わせたロボットの遠隔操作の実用性が確認され、今後のユースケース拡大や実装につながると期待されます。また、本システムをdocomo MECを通じてサービスとして提供することで、ユーザは無線遠隔ロボットソリューションおよびサービスの開発や運用をより少ない負担で行うことが可能となり、参入や導入のハードルを下げることにつながると期待されます。
ドコモと慶大は、高度なロボットの無線遠隔操作ユースケース創出と社会実装に向け、リアルハプティクスをはじめとするロボット制御技術や通信の低遅延化技術などの開発、開発技術を活用したユースケースの実現に向けて今後も取り組んでまいります。
なお、本実証で用いたドコモの技術と「リアルハプティクス」を組み合わせる技術の取り組みは、2025年10月9日(木)からNTTドコモビジネスが開催する「NTT docomo Business Forum'25」にてご紹介します。
(https://www.ntt.com/business/go-event.html)
※1 慶應義塾大学ハプティクス研究センターの大西公平特任教授が発明した現実の物体や周辺環境との接触情報を双方向で伝送
し、ヒトの力加減をロボット上で再現する技術
※2 2025年10月7日時点、ドコモ調べ
※3 5G 時代に求められる MEC(Multi-access Edge Computing)の特長である、低遅延、高セキュリティ などの機能を持つ
ドコモのクラウドサービス
※4 モバイル技術で力加減を伝送︖遠隔操作・AIロボット・メタバースの新境地︕
(https://www.docomo.ne.jp/corporate/technology/rd/6g/007/)
※5 docomo MECのオプションサービスであり、接続端末とMEC基盤を直結して通信経路を最適化することで、低遅延・高セ
キュリティ通信を実現。
*「リアルハプティクス」はモーションリブ株式会社の登録商標です。
*「docomo MEC」「MECダイレクト」は株式会社NTTドコモの登録商標です。
*「docomo MEC」「MECダイレクト」は株式会社NTTドコモが提供元であり、NTTドコモビジネス株式会社が代理人として
保有する契約締結権限、および包括的な業務受託にもとづき販売しています。
別紙
実証実験の概要
1. 背景
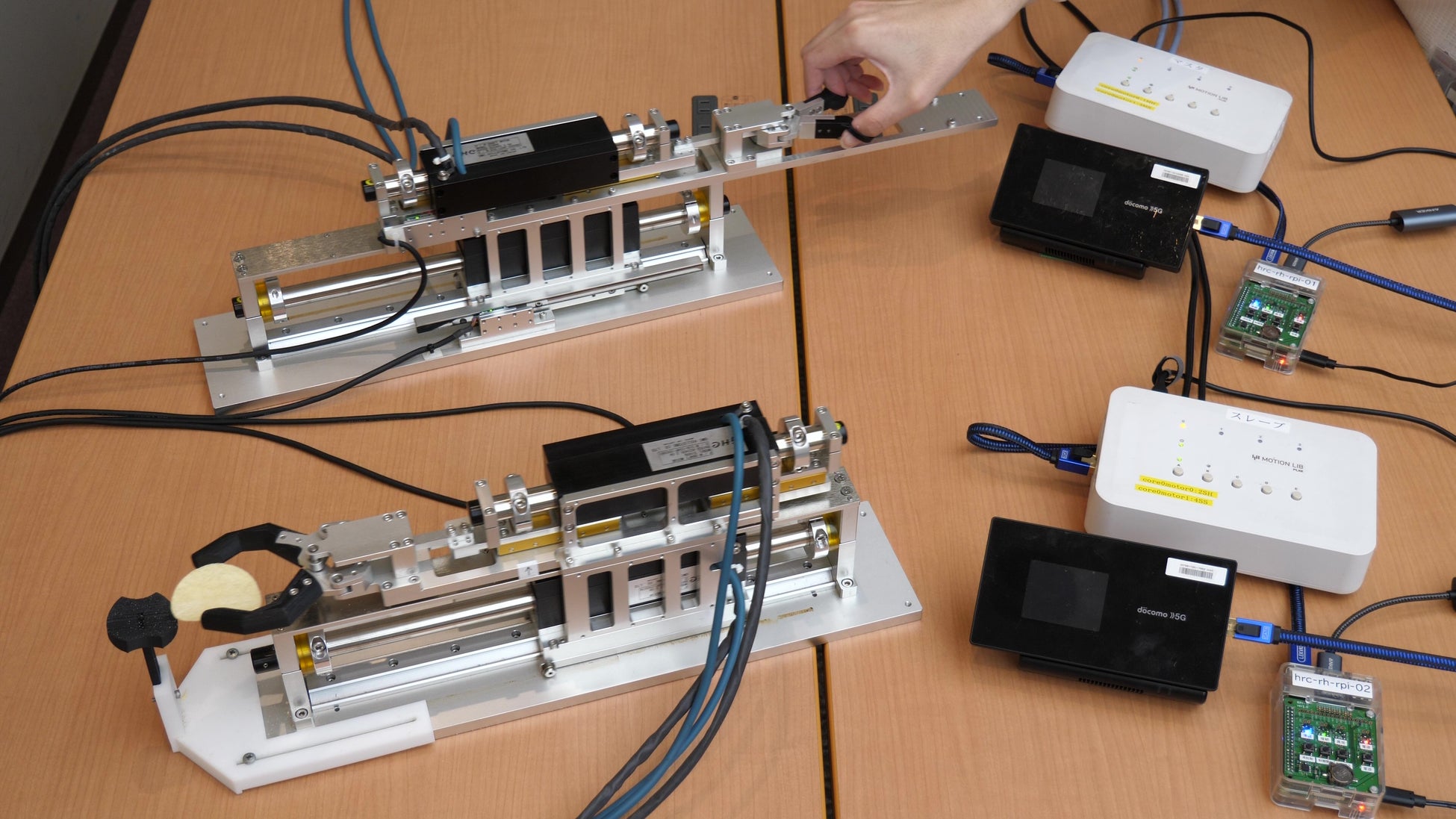
リアルハプティクスは、物に触れた際の手応えをロボット上で再現する技術です。リアルハプティクスを用いることで、遠隔地にいる操作者は、力加減の感覚に基づいた繊細なロボット遠隔作業を行うことができます。操作側の装置であるリーダーと、被操作側の装置であるフォロワーとの間で、リアルタイムに位置や力、速度を同期させることで、操作者へ物に触れた際の手応えを伝えたり、操作者の繊細な力加減を対象物へ伝えることができます。
リアルハプティクスとモバイルデータ通信を組み合わせることで、例えばこれまでは屋外でしか実施できなかった業務を遠隔地にある屋内で行うことができ、ロボットの利用シーン拡大につながることが予想されます。しかし、リーダーとフォロワーとをつなぐネットワーク通信経路で生じる通信遅延とその変動は、リアルハプティクスの制御を不安定なものにし、手応えのフィードバックを不鮮明にする、ロボットの操作を重くする、がたつかせるなどの悪影響を生じます。特に、現在の商用モバイルデータ通信環境では、ロボットやタスクに求められる遅延要件を満たせないことが多く、リアルハプティクスによる無線遠隔操作の安定化に課題がありました。
2. 今回開発した技術の概要
本実証では、モバイルデータ通信を介したリアルハプティクスの遠隔制御を実現するため、3つの技術要素を組み合わせて併用するという新しい手法を採用し、開発を行いました。各技術要素の概要は下記の通りです。

|
MECサーバ上に実装した |
通信経路で発生する遅延の変動は、ロボット操作をがたつかせるように作用するため、ロボットの操作性が損なわれます。ジッターバッファ機能を搭載したサーバは、ロボット制御用パケットを受信するとすぐには転送せず、ジッターバッファと呼ばれる一時保管庫に溜め込み、周期的に転送します。 ジッターバッファ機能の働きにより、上り区間で生じた通信遅延の変動が均一化され、がたつきの影響を低減しロボット操作の滑らかさを改善します。 |
|---|---|
|
MECダイレクトの利用 |
MECダイレクトはdocomo MECが提供する機能の一つで、通信経路の低遅延化や通信の高セキュア化に役立ちます。MECダイレクトを利用する ことで、データパケットを外部のネットワークを経由することなく送受信することが可能となります。 |
|
端末装置上に実装した 通信遅延補償機能 |
通信経路で発生する遅延によりロボット操作が重くなることがあり、操作性が損なわれます。慶大が開発した通信遅延補償機能は、通信遅延によって生じた力のノイズを予測モデルによって除去する技術です。通信遅延補償機能により、通信遅延がもたらす影響を抑えロボット操作の重さを改善します。 |
ジッターバッファ機能は通信経路における遅延の変動を吸収し、ロボット操作の滑らかさの改善に寄与します。しかし、ジッターバッファ機能はジッターバッファ遅延(ジッターバッファにパケットを溜め込んでから取り出すまでにかかる時間が通信遅延となること)を発生させるため、この遅延増加分がむしろ操作に悪影響を及ぼすおそれがあります。
また、通信遅延補償機能は通信遅延増加の影響を除去する効果(補償効果)を発揮し、ロボット操作の重さの改善に寄与しますが、遅延の変動が大きい環境では補償効果が低減するおそれがあります。本実証では、両機能を併用するという新たなアプローチを採用することで、両機能のデメリットを除去し、メリットのみを享受できるようにしています。すなわち、ジッターバッファ機能は通信遅延を均一化するようにはたらくことで通信遅延補償機能の効果を高め、また通信遅延補償機能はジッターバッファ遅延を含む均一化された通信遅延の影響を除去します。
一般に、ジッターバッファ機能といった通信制御機能は端末側(ロボット側)に実装されるものです。本実証では、高度なロボット技術の無線遠隔化をたすける遅延対策機能(通信制御機能)をサーバのプラットフォーム上に実装し、ユーザにとって適切にカスタマイズされた機能をサービスの一環として提供するという新たな実施形態を採用しています。これにより、ユーザの開発・運用負担の軽減や、プラットフォームの高機能化や機能拡張性の向上につながると期待されます。後述の結果より、本実証によって本実施形態の有用性が確認されました。
3. ネットワーク構成と実験手法
本実証では、ドコモ商用5G(NSA)を使い、リーダー・フォロワーと、ドコモが現在開発を進めるロボット用独自プラットフォームを実装したdocomo MEC上の仮想サーバとを接続したネットワーク構成をとっています。一方の装置が送信した制御用データパケットは、上り区間においてドコモ商用網、docomo MEC閉域網を通り、サーバに届けられます。サーバはこのパケットを他方の装置に向け転送します。パケットは、下り区間においてはdocomo MEC閉域網、ドコモ商用網を通り、他方のロボットに届けられます。パケットの送受信がリーダー・フォロワー間で双方向にリアルタイムでなされることで、手応えの伝わるリアルハプティクス制御が実現されます。
本実証では、ハンド型のフォロワーとその操作部であるリーダーを用いて、割れやすい菓子であるポテトチップスを定められた時間内に把持し、運搬するという定型的なタスクを実施し、新規手法の適用時と非適用時における結果を比較しました。
4. 結果
新規手法の非適用時は、通信経路において付加される通信遅延とその変動によって、手応えのフィードバックが不鮮明になる、ロボットの操作が重くなる、がたつくなど、ロボットの遠隔操作は不安定でした。その結果、把持対象物であるポテトチップスを割ったり、落とすなどで時間内のタスク完遂が困難でした。一方、新規手法の適用時は、docomo MEC上に実装したジッターバッファ機能と端末装置上に実装した通信遅延補償機能とが連携的に作用することで、フィードバックの鮮明さや、ロボットの操作の重さやがたつきが改善されました。その結果、安定的な遠隔操作で、把持および運搬のタスクを時間内で容易に完遂することが可能となりました。
またロボット遠隔操作の安定性改善については、ロボット動作の滑らかさに関する指標値の結果から定量的に改善されていることが確認できました。
|
ロボット動作の特定の区間における |
|
|---|---|
|
新規システム非適用時 |
23.3931 |
|
新規システム適用時 (ジッターバッファのサイズを適切に設定した場合) |
22.1115 |
※動作の滑らかさを加速度変化の程度で示した指標。値が小さいほど、より滑らかな動作であることを意味する。
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
- 種類
- その他
- ビジネスカテゴリ
- ネットワーク・ネットワーク機器
- ダウンロード