ひたちBRT自動運転バスの実証実験において3D-LiDARを活用した「交差点監視システム」の検証を実施
茨城交通株式会社(本社:茨城県水戸市、代表取締役社長:任田 正史)、株式会社みちのりホールディングス(本社:東京都千代田区、代表取締役グループCEO:松本 順)、パイオニア株式会社の100%子会社であるパイオニアスマートセンシングイノベーションズ株式会社(本社:東京都文京区、代表取締役社長:高木 晴彦、以下 PSSI)は、ひたちBRT中型自動運転バス実証検討協議会が実施する「中型自動運転バスによる実証実験」に参加し、一般道交差点を対象とした走行支援の実証を行います※。
本実証では、PSSIが開発した3D-LiDAR「2020モデル」を一般道交差点の路側に設置し、交差点内外を走行する車両等を検知して、その存在とリスクの度合いを自動運転バスおよび乗客に知らせる「交差点監視システム」の検証を行います。
※ 2020年9月23日に、以下報道資料にて概要を発表しております。
報道資料:一般路線バスひたち BRT で自動運転バスの実証実験
~路側センサーや遠隔監視装置を活用した実証で 2022 年以降の本格実装を目指す~
■実証実験における検証の概要
PSSIは、路線長が約9kmのひたちBRT路線内の、大沼小学校東停留所の南に位置する複雑な形状の交差点の路側に自社で開発した3D-LiDAR「2020モデル」を設置。交差点内外を走行する車両等を検知して、車両等の存在およびそのリスクの度合いを自動運転バスや乗客に共有する「交差点監視システム」を検証します。
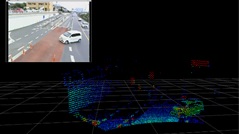
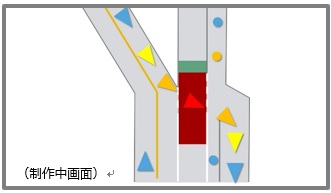
3D-LiDARで取得した点群データを解析して得られた交差点内外の車両等の位置や進行方向、速度等の情報を自動運転バスへ事前に共有するとともに、検知した車両等のリスクの度合いまで判定し、色分けしたグラフィック表示でバスの乗客や遠隔監視者へ知らせることにより、安心・安全な自動運転バスの運行をサポートします。
■PSSIが開発した3D-LiDAR「2020モデル」
今秋発売の3D-LiDAR「2020モデル」は、MEMS※ミラーによるラスタースキャン方式を採用しており、小型でありながら高密度かつ高精細な点群データを取得することが可能です。車載、交通監視用途のほか、セキュリティ、船舶、農業・建設機械、ロボットなど幅広いシーンでの活用を想定しています。
■路側3D-LiDARによる交差点監視システム
交差点の路側に設置した3D-LiDARで、他の通行車両等を検知し、安心・安全な自動運転バスの運行をサポートします。
① 3D-LiDARで交差点内外の車両等を監視。 MEMSミラー方式により高密度かつ高精細な点群データが得られます。
② 取得データを解析し、検知した車両等に関する情報(位置、進行方向、速度等)を自動運転バスに伝えます。
③ さらに自動運転バスの乗客や遠隔監視者向けに、検知した車両等のリスク(交差点への進入度合い)を判定し、色分けしたグラフィックでお知らせします。
※本実証実験での当社機器設置場所における画像データの取得は、「交差点監視システム」実現のための当該交差点内外の通行車両、通行者等の状況把握を目的としており、個人の皆様を特定するものではありません。また、取得した画像データは前記システムの実現に向けた技術研究・開発のためにのみ各々のグループ会社内において使用し、これに必要な範囲を超えて第三者への開示・提供は行いません。
本実証では、PSSIが開発した3D-LiDAR「2020モデル」を一般道交差点の路側に設置し、交差点内外を走行する車両等を検知して、その存在とリスクの度合いを自動運転バスおよび乗客に知らせる「交差点監視システム」の検証を行います。
※ 2020年9月23日に、以下報道資料にて概要を発表しております。
報道資料:一般路線バスひたち BRT で自動運転バスの実証実験
~路側センサーや遠隔監視装置を活用した実証で 2022 年以降の本格実装を目指す~
■実証実験における検証の概要
PSSIは、路線長が約9kmのひたちBRT路線内の、大沼小学校東停留所の南に位置する複雑な形状の交差点の路側に自社で開発した3D-LiDAR「2020モデル」を設置。交差点内外を走行する車両等を検知して、車両等の存在およびそのリスクの度合いを自動運転バスや乗客に共有する「交差点監視システム」を検証します。
3D-LiDARで取得した点群データを解析して得られた交差点内外の車両等の位置や進行方向、速度等の情報を自動運転バスへ事前に共有するとともに、検知した車両等のリスクの度合いまで判定し、色分けしたグラフィック表示でバスの乗客や遠隔監視者へ知らせることにより、安心・安全な自動運転バスの運行をサポートします。
■PSSIが開発した3D-LiDAR「2020モデル」
今秋発売の3D-LiDAR「2020モデル」は、MEMS※ミラーによるラスタースキャン方式を採用しており、小型でありながら高密度かつ高精細な点群データを取得することが可能です。車載、交通監視用途のほか、セキュリティ、船舶、農業・建設機械、ロボットなど幅広いシーンでの活用を想定しています。

■路側3D-LiDARによる交差点監視システム
交差点の路側に設置した3D-LiDARで、他の通行車両等を検知し、安心・安全な自動運転バスの運行をサポートします。
① 3D-LiDARで交差点内外の車両等を監視。 MEMSミラー方式により高密度かつ高精細な点群データが得られます。

② 取得データを解析し、検知した車両等に関する情報(位置、進行方向、速度等)を自動運転バスに伝えます。
③ さらに自動運転バスの乗客や遠隔監視者向けに、検知した車両等のリスク(交差点への進入度合い)を判定し、色分けしたグラフィックでお知らせします。
※本実証実験での当社機器設置場所における画像データの取得は、「交差点監視システム」実現のための当該交差点内外の通行車両、通行者等の状況把握を目的としており、個人の皆様を特定するものではありません。また、取得した画像データは前記システムの実現に向けた技術研究・開発のためにのみ各々のグループ会社内において使用し、これに必要な範囲を超えて第三者への開示・提供は行いません。
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザーログイン既に登録済みの方はこちら
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
