業界初の非木造建築用窓施工ロボット「MABOT」を開発
建設現場作業の安全性と生産性向上や省人化に貢献
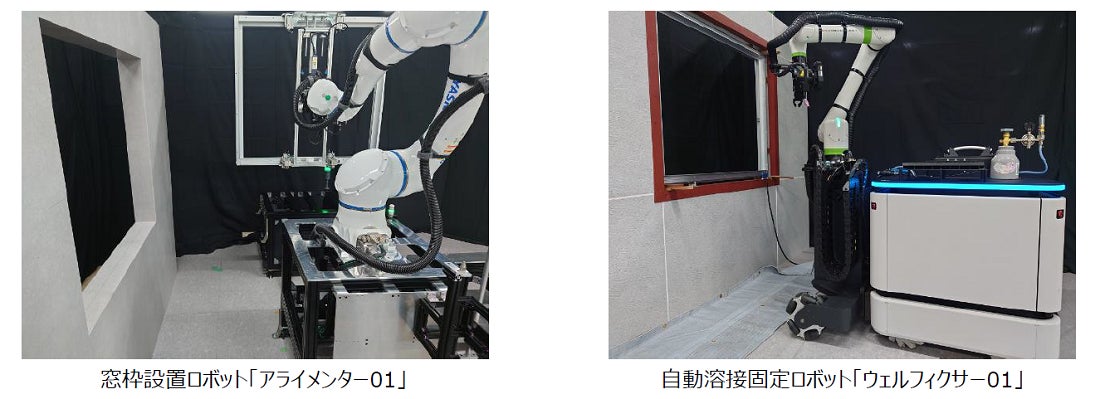
YKK AP株式会社(本社:東京都千代田区、社長:魚津 彰)は、業界で初めて(※1)非木造建築の建設現場で窓の施工を行うロボット「MABOT(マボット)」を開発しました。「MABOT」は、自律移動して人と一緒に働くロボットシステムのシリーズで、今回は窓枠を設置する「Alignmenter01(アライメンター01)」(以下、アライメンター)と、設置された窓枠を自動溶接固定する「Welfixer01(ウェルフィクサー01)」(以下、ウェルフィクサー)を開発。建設現場において熟練技能のスキルレス化や危険有害作業に対する安全性の向上など、建設現場の作業環境改善に貢献することを目的に、非木造建築物(ビル)の建設現場での実証試験を開始します。
YKK APは、人口減少に伴う労働力不足や高齢化などの問題や、「2024年問題」と呼ばれる長時間労働を是正するための時間外労働規制への対応が求められている建設業界において、建設DXに挑戦しています。ビルの建設現場における省人化、工期短縮、スキルレス、安全性の確保などに寄与すべく、商品開発やデジタル技術を取り入れた施工方法の確立などを進めています。
そこでこの度、ビルの施工技能者が行っている窓施工の作業を自動で行う窓施工ロボット「MABOT」を開発しました。窓枠を正確な位置に設置するロボット「アライメンター」は、基準墨(※2)から設置位置を確認し、高精度な位置決め機能で窓枠をビルの躯体に設置します。計測からクサビ(※3)を用いた窓枠の建て込み設置までの一連の施工技能者による作業を自動で行うことが出来るため、熟練技能者の不足に対応します。一方、自動溶接ロボット「ウェルフィクサー」は、開口部に木クサビ等で建て込み設置された窓枠の四周に対し、躯体に窓枠を固定する鉄製ブラケットを自動で配置し溶接固定します。これにより、溶接工程を省人化できるほか、作業員の高所作業による災害リスクの低減や、有毒な溶接ヒュームを吸引する健康障害リスクの低減、不活性ガスにより火花を抑えることで火災リスクを低減し、安全性も向上します。
YKK APは、今後も窓施工における資材運搬や品質検査、AIを用いた画像認識や自律移動機能を搭載した、「複数のロボットが会話する連携ロボット」などの開発を進め、ビルの建設現場での実使用を目指すとともに、建設業界の課題解決に取り組んでまいります。
<窓施工ロボット「MABOT」の主な特長>
窓枠設置ロボット「アライメンター01」
・開口部の基準墨を自動認識
・高精度な位置決め機能
・着脱式エンドエフェクター(※4)の拡張性
自動溶接固定ロボット「ウェルフィクサー01」
・BIM(※5)データを基に自律移動
・広い可動範囲で様々な窓種に対応
・火花を抑えた自動溶接
・回転やスロープに対応できる機動性と急速充電による汎用性
【窓枠設置ロボット「アライメンター01」の特長】
■開口部の基準墨を自動認識
開口部に打たれた通常の建築現場で使用されている黒色墨を認識することが可能です。
■高精度な位置決め機能
スキャンした墨情報を基準に位置決めすることで、自己位置や開口の精度不良を補正し、正しい位置へと窓枠を建て込み設置します。
■着脱式エンドエフェクターの拡張性
窓枠の把持と設置機能があるエンドエフェクターは着脱式になっており、ロボットとエンドエフェクターの開発に拡張性を持たせています。窓枠を設置した状態で次の溶接固定ロボットへ引継ぐ施工手順や、エフェクター変更による他窓種対応を想定しています。
【自動溶接固定ロボット「ウェルフィクサー01」の特長】
■BIMデータを基に自律移動
BIMデータから作成した地図情報を基に、自機と壁や柱との距離をセンシングしながら設置された窓枠の前へと移動します。BIMデータとの連携により、施工順番の変更、前工程の進捗情報を活用、作業結果を反映した工程管理なども可能になります。
■広い可動範囲で様々な窓種に対応
ロボットに自動昇降リフターを搭載し、はきだし窓の溶接を想定した低所(最低地上高0mm)から高所(最高地上高3.2m)までの広い可動範囲で、様々な窓種に対応します。
■火花を抑えた自動溶接
開口部に木クサビ等で位置決め設置された窓枠の四周に対し、鉄製ブラケットを自動で配置し溶接します。これにより、作業員が有毒な溶接ヒュームを吸引するリスクを低減するほか、不活性ガスを搭載しているため、火花の発生を抑えた溶接が可能です。
■回転やスロープに対応できる機動性と急速充電による汎用性
バッテリー駆動でコードレスかつ、四輪独立駆動で縦横斜め、回転、スロープ移動のほか、20mm程度の段差があっても自在に移動が可能です。また、30分の急速充電で100分稼働できるため、安全作業サイクルに適応した効率的な施工が可能です。移動中は人やモノなど障害物を自動検知して回避するほか、人やモノが接触した際には、自動停止するなど安全にも配慮しています。
【「MABOT」基本情報】
・主な適用対象商品:ビル用Window 「EXIMA 31」
・ロボット本体サイズと重量:
「アライメンター01」 幅1,040mm×高さ2,020mm×奥行790 mm、250 kg
「ウェルフィクサー01」 幅930mm×高さ1,900mm×奥行1,700 mm、550 kg
<ご参考>
YKK APが思い描く「未来の建設現場」を動画でご覧いただけます。
「Future Vision of Construction Sites」
YKK APは、~人とロボットが協力し合ってより良い社会を築く~
そんな明るく楽しい建設現場の未来像を想い描いています。
※1:2024年8月1日現在、日本国内の建設現場における人協働型窓施工ロボットシステムに関する自社調べ
※2:建設現場における墨とは、床、柱、壁やその開口部に書かれる、建築の構造物や仕上げ物の基準となる墨で打たれた線のこと。
※3:V字形の木の小片で、サッシを躯体に取り付ける時、位置決め調節するために枠と躯体との隙間に差し込むもの。
※4:ロボットアームの先端に取り付けられ、掴む、加工する、ネジを締めるなどの動作を行う、ロボットハンドともよばれる機器のこと。
※5:Building Information Modeling(ビルディング インフォメーション モデリング)の略称で、コンピューター上に作成した3次元の形状情報に加え、建築物の属性情報(各部位の仕様・性能、居室等の名称・用途・仕上げ、コスト情報など)により、建築の設計・施工、維持管理を効率化する仕組みのこと。
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像