NEC、NEXCO中日本の新東名高速道路上における自動運転時代のインフラ支援に向けた路車協調実証実験に参画
〜 自動運転社会を支えるサイバーフィジカルシステムによる高速道路空間の知能化 〜
日本電気株式会社(本社:東京都港区、取締役 代表執行役社長 兼 CEO:森田 隆之、以下NEC)は、自動運転時代に向けて高速道路空間の知能化を図り、より安全、安心、快適に走行できる高速道路空間の実現を目指しており、E1A 新東名高速道路(新東名)の建設中区間をフィールドとした路車協調実証実験に参画しました。
路車協調実証実験は2024年7月2日(火)から7月9日(火)まで、実証実験区間(橋梁、土工部、トンネルを含む約3.1km)にて実施しました。
本実証実験は、中日本高速道路株式会社(本社:名古屋市中区、代表取締役社長CEO:小室俊二、以下NEXCO中日本)が主体となり、国土交通省、国土技術政策総合研究所、NEXCO 東日本、NEXCO 西日本および NEXCO 総研と連携し実施しています。
詳細は、NEXCO中日本のWebサイト、以下のプレスリリースをご確認下さい。
https://www.c-nexco.co.jp/corporate/operation/v2i/
https://www.c-nexco.co.jp/corporate/pressroom/news_release/6043.html
【実証実験概要】
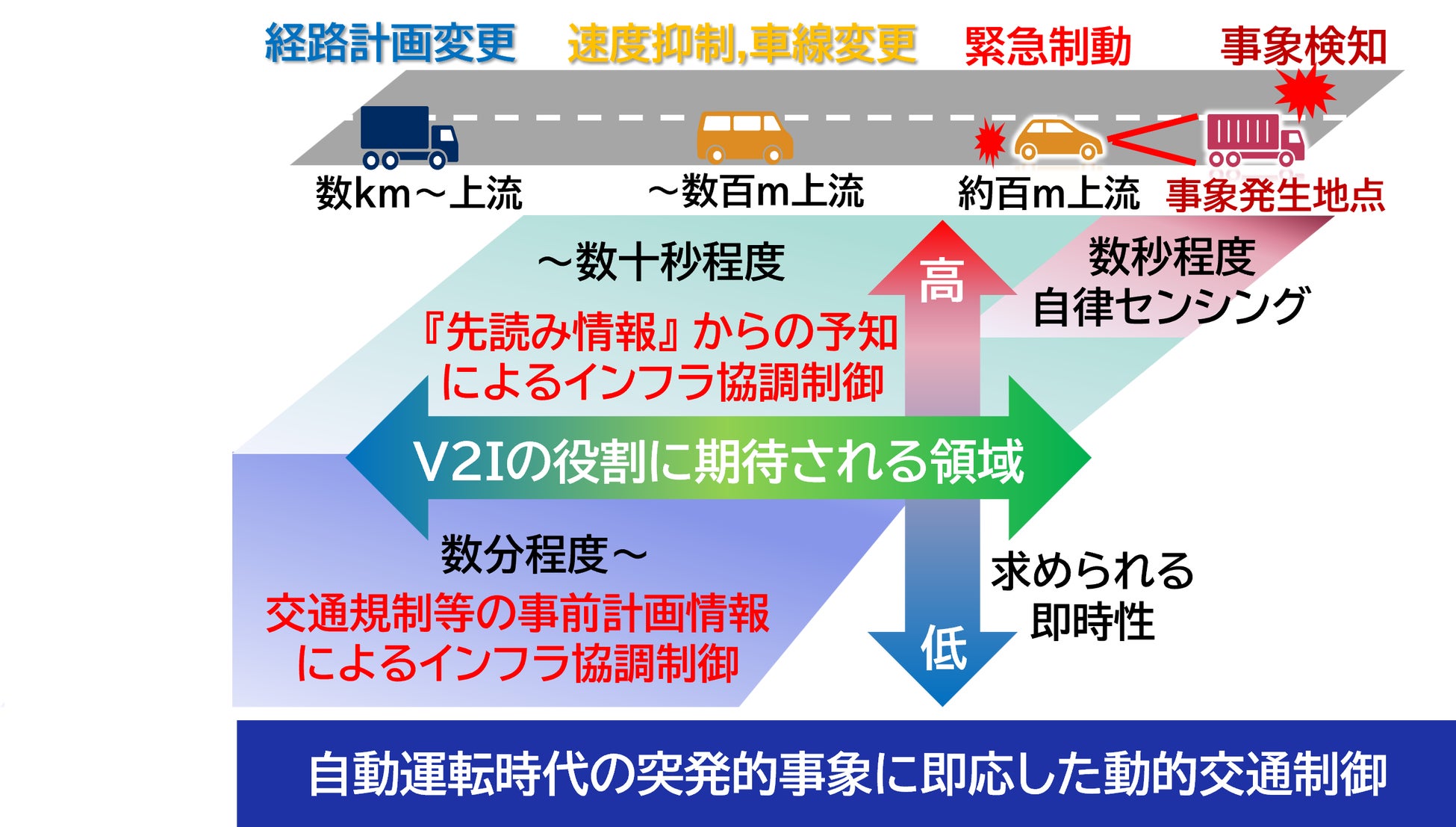
現在、高速道路上における自動運転トラックの安全で円滑な自動運転の実現に向けて重要となる「路車協調」の仕組みについて様々な開発が進められています。路車協調とは、車両に搭載した車載自律センサでは検知出来ないさらに前方の道路交通情報(先読み情報)を、インフラ側である道路側からの情報をもとに連携・提供することで、よりスムーズな交通を実現するものです。
高速で走行する自動運転トラックでは広範かつ早期の事象把握を必要とするため、自動運転トラックと周辺の他の自動車、道路管制側の交通インフラを繋げる「高速道路空間上のConnected環境の実用化」が期待されています。
車載の自律センサで検知できない事象の具体例としては、インターチェンジやジャンクション、サービスエリアなどの合分流箇所における非コネクテッド車(一般車)との交錯リスクや、予測困難な突発的に発生する路上障害物や交通事故等が考えられ、それらに関するリスクの低減が求められています。
今回の実証実験では実道上におけるインフラ支援機能を想定し、道路上の情報を収集するセンサである収集系設備(車両検知センサ)と、コネクテッド車に対し情報を提供する提供系設備(路車間通信:自営通信網Vehicle to Infrastructure、以下V2I)を路側に配備し、車載器(車載PC上の自動運転模擬アプリ)を搭載したコネクテッド車を実際に走行させる実証実験を実施しました。
これは「デジタルツイン技術によるサイバーフィジカルシステム」(図1)を構築し、「突発的事象に即応した動的交通制御」(図2)の想定シナリオを実道上に再現したフィールド実証と位置づけており、これにより路車協調によるインフラ側の支援の有効性の検証を目的としたものです。
NECではNEXCO中日本が定めるユースケース5「交通状況に応じた情報提供による高速道路ネットワークの最適化」(図3)、およびユースケース6「交通状況に応じた車群制御情報の提供による交通容量の最大活用」(図4)に参画しました。

【NECの実証実験の成果】
従来の提供系設備は道路情報板やITSスポット(情報提供媒体)などによるピンポイントでの情報提供が行われており、タイムリーな情報入手に課題がありました。
自動運転に求められる情報密度の濃さと言う点において、今回の実証実験では「①路車間通信機能(V2I)」の提供系設備により、高速道路空間を連続的な通信エリアとして構築することで「情報提供の継続性」の有用性が確認出来ました。
また、従来の収集系設備は離散的なスポット観測により情報の収集粒度が粗く、FM多重放送を介したカーナビへの情報提供では事象の発生から情報提供に至るまで15分程度のタイムラグが生じることが想定されていました。
今回の実証実験では「②リアルタイム事象検知機能」の収集系設備による連続的な情報収集と「①路車間通信機能(V2I)」の通信環境を現場近傍のエッジにおけるローカル処理を行うことで、事象発生から情報提供が行われるまで、従来の分オーダーから秒オーダーへの性能向上を実現、即時対応に向けた有用性が確認出来ました。
なお、今回の実証実験の特徴と詳細については別紙1をご参照下さい。また、参考情報、および補足を別紙2、NECの「次世代のITS」に対する取組みは別紙3をご参照下さい。
【今後の展望】
自動運転時代の高速道路空間の安全性の確保に向け、今回の路車協調実証実験の成果を基に、近未来を高精度で予測する 『サイバーフィジカルシステムの実用化』に向けて、自動運転時代の社会貢献に取り組んで行きます。
以 上
別紙1.実証実験詳細
【NECの実証実験の特徴】
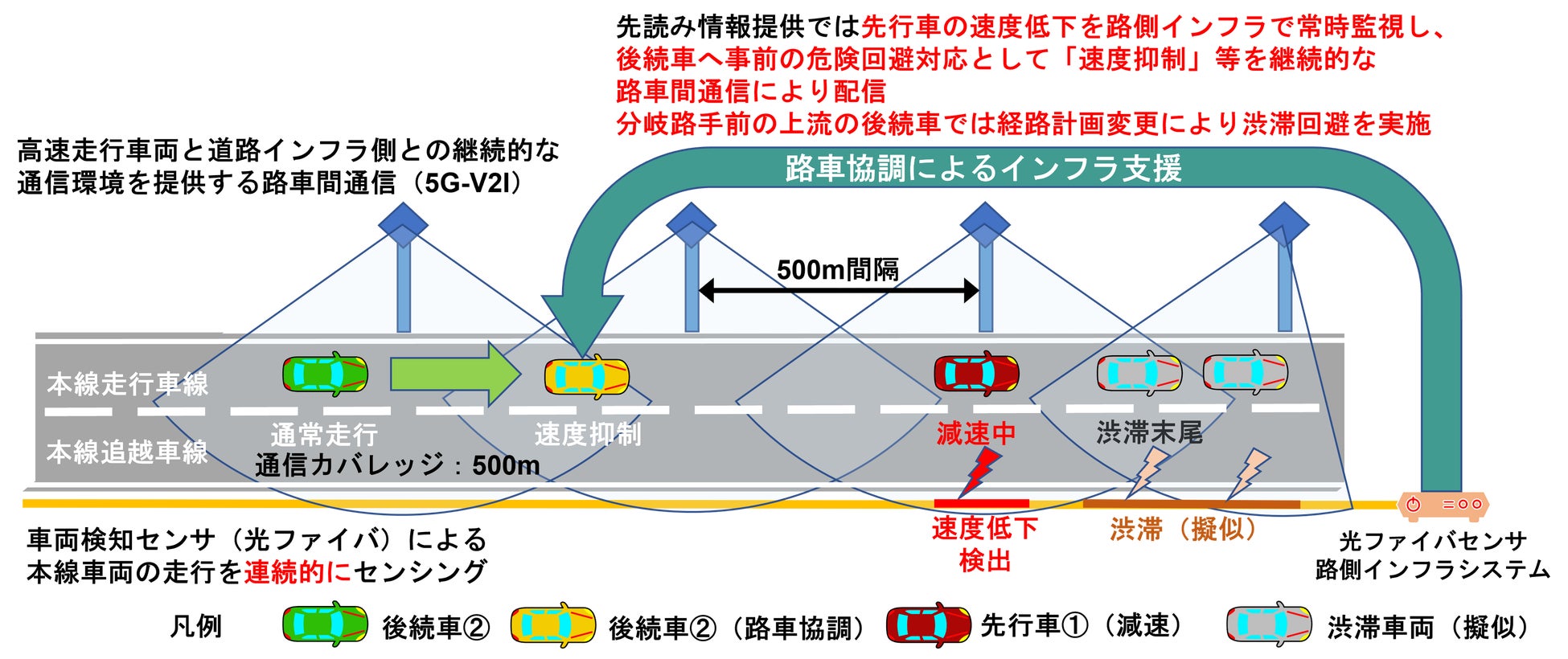
NECの実証実験ではコネクテッド車が「継続走行可能な道路交通環境」を確保するためのインフラ側の支援として、「①高速走行車両と道路インフラ側との継続的な通信環境を提供する路車間通信機能(V2I)」による提供系設備、「②監視漏れのない連続的な全線監視(ライン観測)によるリアルタイム事象検知機能」による収集系設備を建設中の高速道路本線上に実際に整備して、車載器を搭載したコネクテッド車の走行によりリアルな実地検証を行うための路車協調システムを構築しました。(写真1)
今回の実証では、①路車間通信機能(V2I)として高速道路事業者の自営通信網を想定した「5Gセルラー通信技術を適用した通信環境」を高速道路上に整備して、自動車と道路インフラ設備間の路車間通信(V2I)を通して、ユースケースの有効性の検証を行いました。

【ユースケース5の実証実験内容】
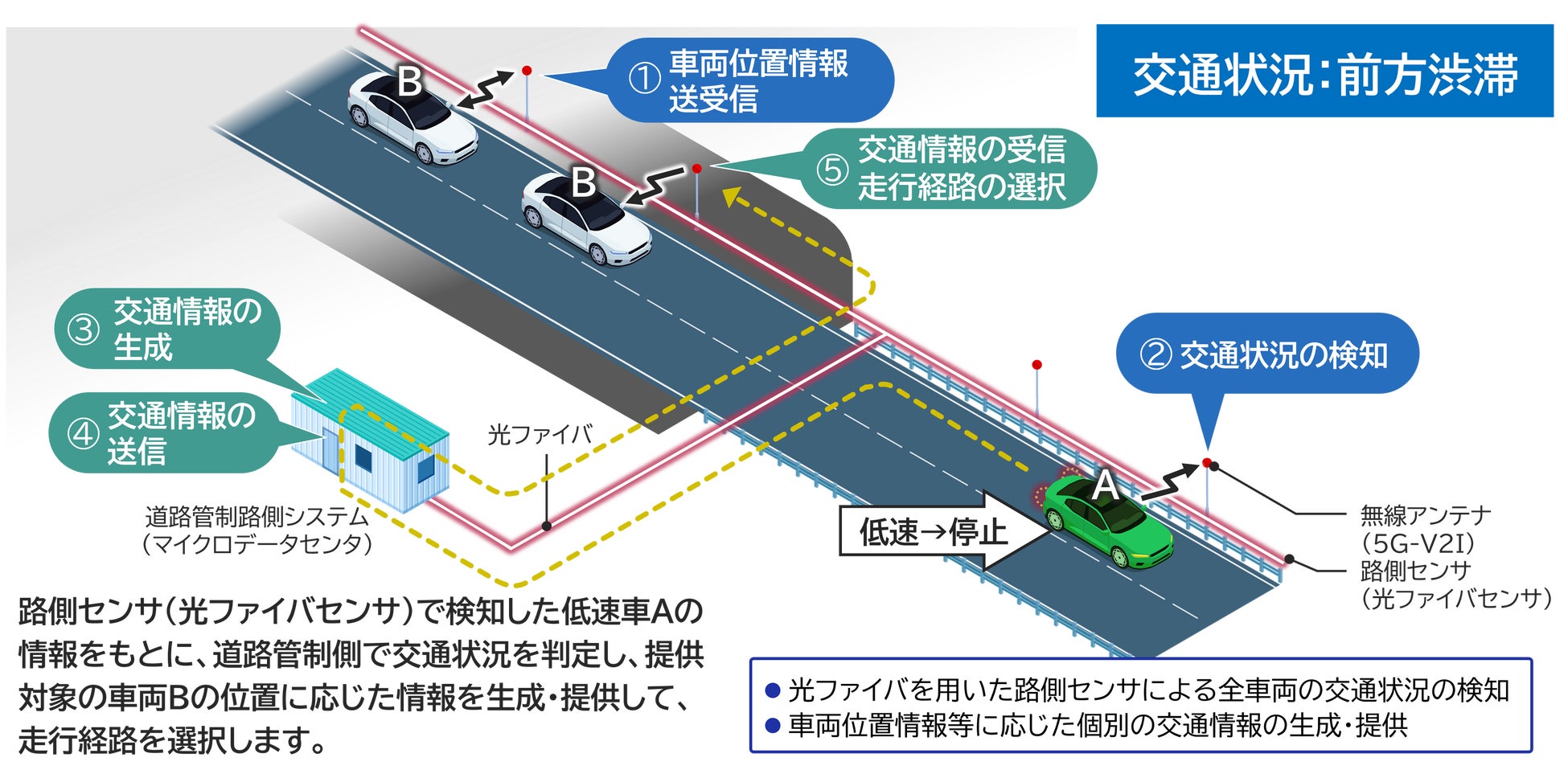
収集系設備である「車両検知センサ(光ファイバセンサ)(別紙3)」では道路に沿って設置された通信用光ファイバを使用して車両の通行による路面の振動を検知することにより交通流の速度を連続的にとらえることが可能です。この光ファイバセンサで検知した前方の低速車情報(渋滞)を基に、路側に設置された処理装置にて即時に交通状況の分析/道路交通情報(先読み情報)の生成を行い、提供系設備である「路車間通信設備(V2I)」を介して後続のコネクテッド車に提供します。
コネクテッド車では、受信した先読み情報と自車位置の関係を基に、走行経路の選択を行うというシナリオを想定しています。
これにより時間的猶予として、数分~数十分程度の「分オーダーの交通状況の変化」に対する経路計画変更などの「先読み情報提供システム」への適用を想定しています。
実証内容の詳細を図5に示します。
[前方渋滞中により先行車40km/h以下⇒後続車両へ速度抑制・経路選択要請]
【ユースケース6の実証実験内容】
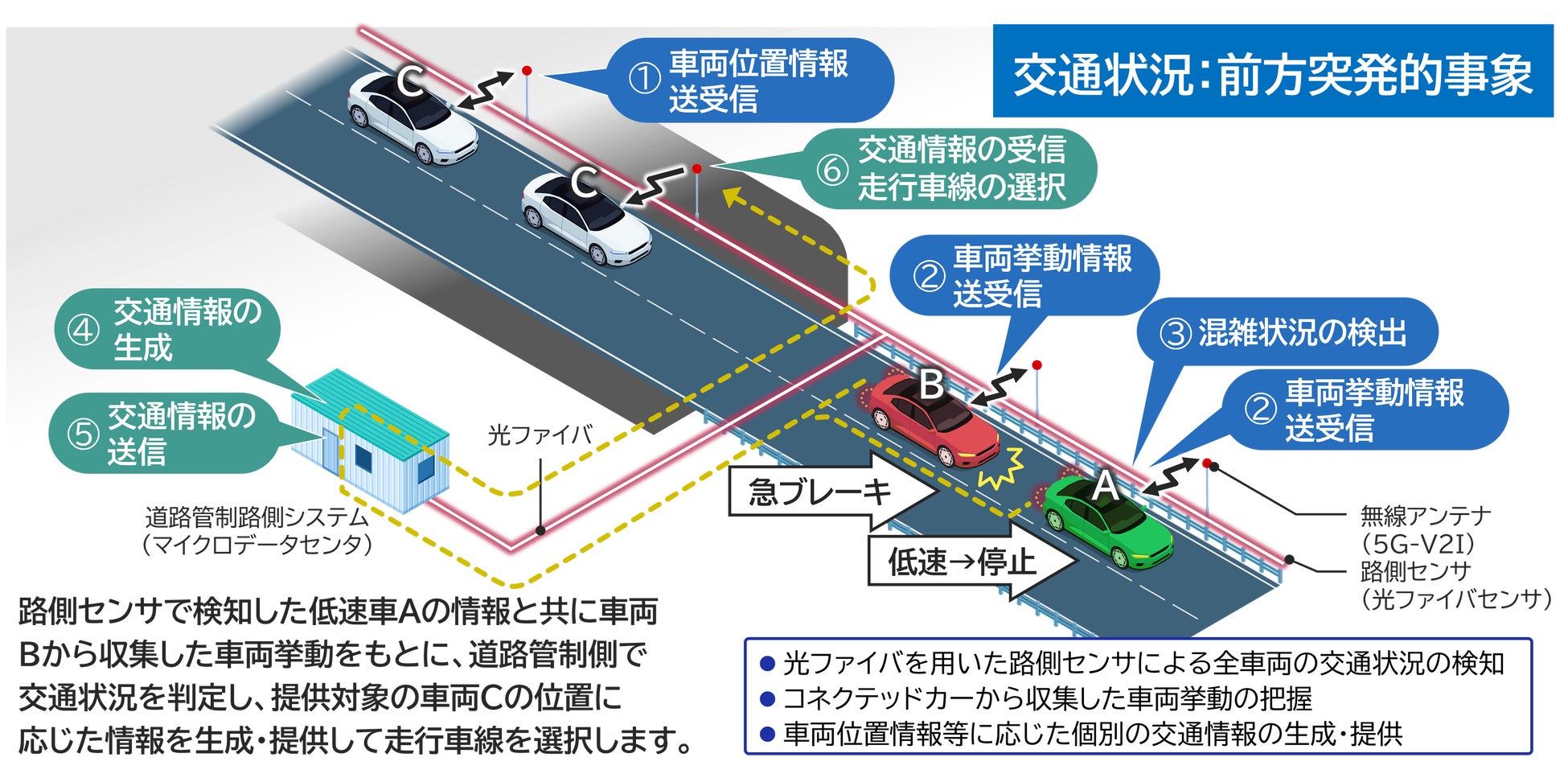
同じく収集系設備である「車両検知センサ(光ファイバセンサ)」で検知した前方の低速車情報(渋滞)、及び前方を走るコネクテッド車から収集した車両挙動情報(急ブレーキ)を基に、路側に設置された処理装置にて即時に交通状況の分析/道路交通情報の生成を行い、提供系設備である「路車間通信設備(V2I)」を介して後続のコネクテッド車に提供します。
コネクテッド車では、受信した道路交通情報と自車位置の関係を基に、走行車線の選択を行うというシナリオを想定しています。
時間的猶予として、数秒~数十秒程度の「秒オーダーで刻一刻と変化する前方直近の交通状況」に対する即時対応が求められる「先読み情報提供システム」への適用を想定しています。
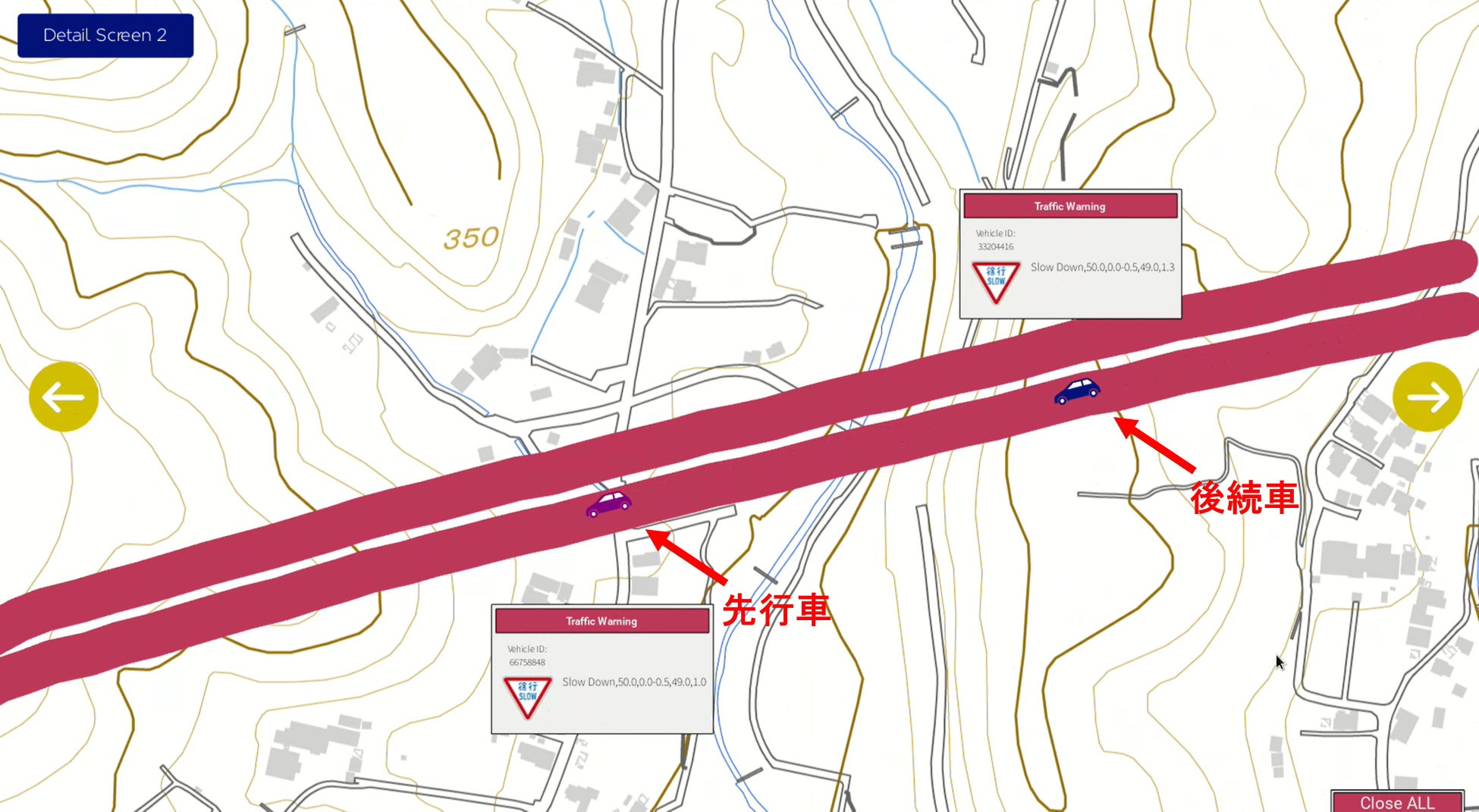
実証内容の詳細を図6に示し、実証実験中における後続車内の様子を写真2に示します。
GIS画面上における車両位置と速度低下発生の状況を画面1に示します。
[突発的事象起因の先行車急減速により40km/h以下⇒後続車両へ速度抑制、車線変更要請]
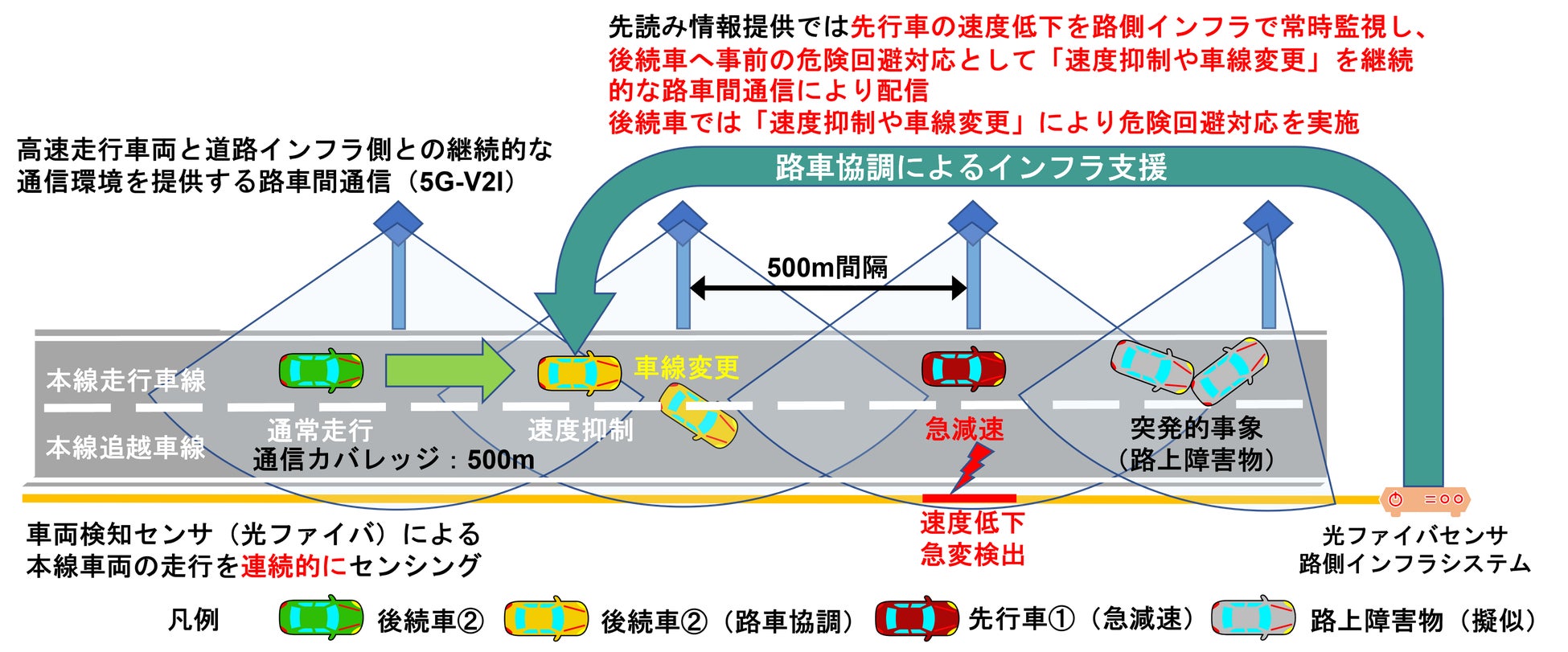

[想定条件(例):走行速度:80km/h、車頭時間:2.5秒(車間距離:45m程度)]
以 上
別紙2.参考情報、および補足
【参考情報】
NECの「次世代のITS」に対する取組み、Beyond 5G時代のデジタルツイン技術(2024年6月17日):別紙3参照
NECのプレスリリースをご確認下さい。(以下リンク)
高速道路の異常事態をリアルタイム検知「革命的」なNECの技術に世界も注目(2023年10月12日)
https://jpn.nec.com/corporateblog/202310/02.html
NEC、NEXCO中日本へ光ファイバセンシング技術を活用した交通状況の高精度監視システムを納入(2022年5月24日)
~既設の通信用光ファイバを用いた連続的な交通流把握を実用化~
https://jpn.nec.com/press/202205/20220524_01.html
【補足】
「先読み情報提供システム」
車両センサでは検知出来ない道路前方の事象の情報を検知し、高速道路本線の上流部を走行する自動運転トラックに情報提供し、余裕を持った事象回避(車線変更、減速等)を支援するシステム
(被合流支援機能、路上障害物等のリスク低減、道路管理高度化に資するシステムの総称)
以 上
別紙3.NECの「次世代のITS」に対する取組み
d78149-664-1776164b2b3282362b5a862a6aa4a99f.pdfすべての画像