世界初、低遅延スライシングにより、商用5Gで「物に触れた手応えが伝わるロボット」の安定的かつ高精細な無線遠隔操作に成功
株式会社NTTドコモ(以下、ドコモ)と慶應義塾大学ハプティクス研究センター(以下、慶大)は、商用5Gを用いたロボットの高精細な無線遠隔操作に関する実証実験(以下、本実証)に成功しました。本実証では、低遅延スライシング※1の一つであるConfigured Grant※2を適用した商用5Gと、慶大が開発したロボティクス技術「リアルハプティクス®※3」を組み合わせ、繊細な力加減と手応えの伝達を安定的に実現しました。商用5Gを介して、ロボットの無線遠隔操作におけるConfigured Grantの有効性を実証した取り組みは、世界で初めて※4です。
本実証では、端末から基地局までの間(以下、無線区間)で発生する遅延や遅延の変動を抑制する
Configured Grantを商用5Gに導入し、その遅延改善効果とリアルハプティクスへの有効性を検証しました。検証の結果、Configured Grantを適用した場合、リアルハプティクスロボットの実用的な遠隔操作に求められる通信遅延要件を達成するとともに、リアルハプティクスロボットの力の再現性や操作性が改善することを確認しました。
遠隔地にいる操作者が操作する装置(以下、操作ロボット)に実際に作業をする装置(以下、遠隔ロボット)が物をつかんだ時の感覚を詳細に伝えるためには、操作ロボットと遠隔ロボットをつなぐモバイルデータ通信において、低遅延かつ遅延の変動がない状態を保つ必要があります。しかし、モバイルデータ通信の遅延や遅延の変動が大きいと、2台のロボット間で力覚や動作の同期が崩れます。その結果、リアルハプティクスが得意とする力加減の再現が適切に行えない、ロボット操作が困難になるといった悪影響が生じます。
ドコモと慶大は、これまでもモバイルデータ通信を介したリアルハプティクスの無線遠隔操作の実現に向けて、技術開発や検証を進めてきました※5。モバイルデータ通信で発生する遅延の要因はさまざまですが、特に影響が大きいとされる無線区間の影響を改善できたことで、これまでは難しかった繊細かつ高度なロボットの無線遠隔操作を、通信の混雑の影響を受けにくい形で、安定的に実行できるようになります。
ドコモと慶大は、今後も高度なロボットの無線遠隔操作の早期実用化に向け、さらなる技術開発と検証に取り組んでまいります。
なお、本実証に関わる取り組みは、2026年3月2日(月曜)から5日(木曜)にかけてスペイン・バルセロナで開催されるGSMA主催「Mobile Worle Congress Barcelona 2026」のNTTグループブースにて展示する予定です。
※1 物理的なネットワークを仮想的に切り分けてユーザに提供するネットワークスライシングのうち、特に低遅延性に特化した
ネットワークを提供する技術
※2 基地局が特定の端末に通信リソースをあらかじめ割り当てておく通信のスケジューリング方式
※3 慶應義塾大学ハプティクス研究センターの大西公平特任教授が発明した現実の物体や周辺環境との接触情報を双方向で伝送
し、ヒトの力加減をロボット上で再現する技術
※4 2026年2月25日時点、ドコモ調べ
※5 NTTドコモ「モバイル技術で力加減を伝送?遠隔操作・AIロボット・メタバースの新境地!」
*「リアルハプティクス」はモーションリブ株式会社の登録商標です。
別紙
本実証の概要
1. 背景
リアルハプティクスは、物に触れた際の手応えをロボット上で再現する技術です。リアルハプティクスを用いることで、遠隔地にいる操作者は、力加減の感覚に基づいた繊細なロボット遠隔作業を行うことができます。操作側の装置である操作ロボット(以下、リーダー)と、被操作側の装置である遠隔ロボット(以下、フォロワー)との間で、リアルタイムに位置や力、速度を同期させることで、操作者へ物に触れた際の手応えを伝えることや、操作者の繊細な力加減を対象物へ伝えることができます。
リアルハプティクスをはじめとする高度なロボットを、モバイルデータ通信を介して利用することで、ロボットの屋外稼働が可能になり、ロボットの利用シーンの拡大につながることが期待されます。しかし、モバイルデータ通信のネットワーク通信経路に特有の通信遅延とその変動は、一般にこれらの高度なロボットの安定的な無線遠隔操作を困難にします。例えば、リアルハプティクスにおいて、モバイルデータ通信を介してロボット操作を実施する場合、手応えのフィードバックが不鮮明になる、ロボットの動きががたつき操作がおぼつかなくなるといった悪影響が生じます。
ドコモと慶大は、ロボットの無線遠隔操作に対する通信遅延とその変動の影響を低減するための様々なアプローチを検討しており、技術開発ならびに検証を進めています。これまで、通信遅延の変動を抑えるためのネットワーク機能と、通信遅延がロボット操作に及ぼす悪影響を低減するロボット機能とを組み合わせるというアプローチを採用し、その有効性を実証しました。今回は、モバイルデータ通信における遅延特性を大きく左右する無線区間に着目して、そこでの遅延や遅延の変動の発生を直接的に抑制することをねらいとしてConfigured Grantを導入するという新たなアプローチを採用し、検証を行いました。
2. Configured Grant機能の概要
低遅延スライシングの一つであるConfigured Grantは、基地局下の特定の端末(回線)に対して優先的に通信リソースを割り当てる方式のことで、モバイルネットワークの混雑状況によらず、無線区間における遅延やその変動を抑制する効果があります。
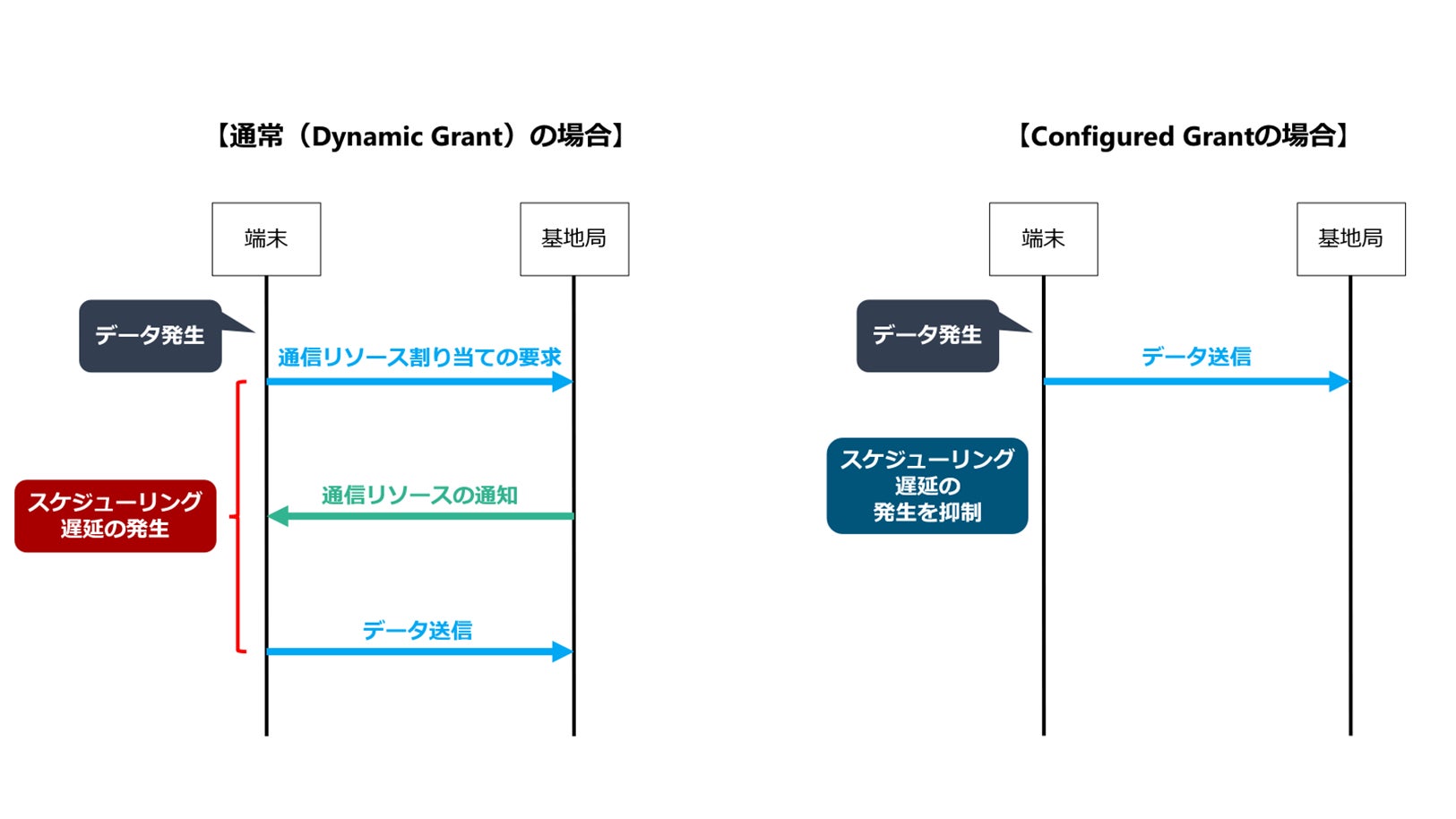
端末が基地局に対してモバイルデータ通信を行う際は、通常、端末と基地局間の通信はDynamic
Grant方式に従って実施されます(図1左)。送信すべきデータが生じた端末は、データの送信に先立って、送信に利用する通信リソースの割り当てを基地局に対して要求します。要求を受け取った基地局は、基地局下の他の端末の通信状況を考慮しながら、リソースの割り当てを決定し端末に知らせます。その後、基地局はこのリソースを利用してデータを基地局に送信します。このとき、端末がリソース割り当て要求をしてから実際にデータを送信するまでの期間は、スケジューリング遅延と呼ばれる通信遅延となります。このスケジューリング遅延は、Dynamic Grantを採用する場合恒常的に発生し、かつネットワーク環境に応じて遅延量が変動するものであるため、安定的な通信経路が求められる高度なロボットの無線遠隔操作において大きな障壁となります。特に、基地局下の端末数が多くネットワークが混雑する環境においては、このスケジューリング遅延が際立ち、ロボットの安定的な無線遠隔操作の実現を困難にします。
一方で、Configured Grantが適用された端末(回線)および基地局間での通信において、基地局は当該の端末に対して、ある期間においてその端末が独占的に利用可能な通信リソースをあらかじめ割り当てておきます。送信すべきデータが生じた端末は、リソースの割り当ての要求を行うことなく、当該の通信リソースを用いてデータを基地局に対して送信することができます(図1右)。すなわち、ここではスケジューリング遅延の発生が抑制されるため、通信経路における遅延および遅延の変動が低減します。
Configured Grantにより、実際のネットワーク環境によらず、高度なロボットの無線遠隔操作に適した良好な遅延特性のモバイルネットワークを安定的に実現することができます。
3. ネットワーク構成と実験手法
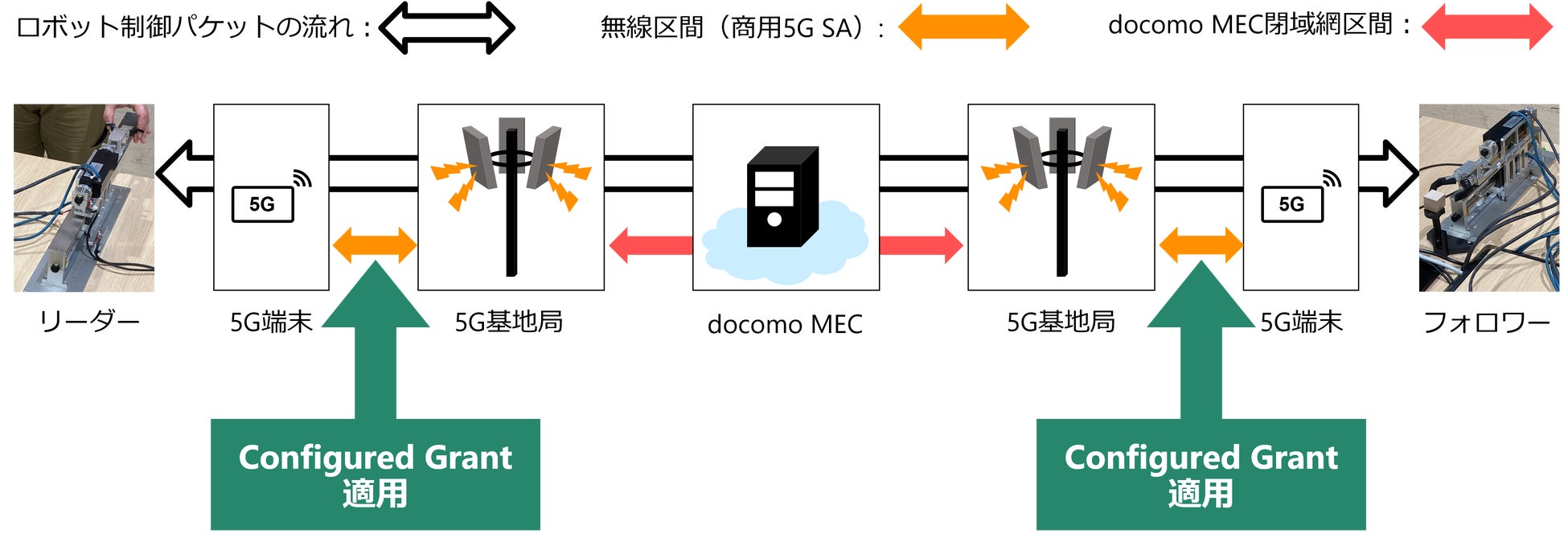
本実証では、ドコモの商用5G SAを利用し、リーダー・フォロワーと、ドコモが現在開発を進めるロボット用独自プラットフォームである「Bilateral Edge Platform™※6」を実装したdocomo MEC 🄬※7上の仮想サーバとを接続したネットワーク構成をとっています(図2)。一方の装置が送信した制御用データパケットは、上り区間においてドコモ商用網、docomo MEC閉域網を通り、サーバに届けられます。サーバはこのパケットを他方の装置に向け転送します。パケットは、下り区間においてはdocomo MEC閉域網、ドコモ商用網を通り、他方のロボットに届けられます。パケットの送受信がリーダー・フォロワー間で双方向にリアルタイムでなされることで、手応えの伝わるリアルハプティクス制御が実現されます。また、実際の遠隔操作では映像伝送用等のトラヒックが重畳することを考慮し、制御用トラヒックの他に20Mbps相当の背景トラヒックを付加しています。
基地局および5G端末には、それぞれConfigured Grantが実装されています。Configured Grant用の設定が付与された回線を介して当該端末と当該基地局が通信を実施する場合、Configured Grantが有効になります。
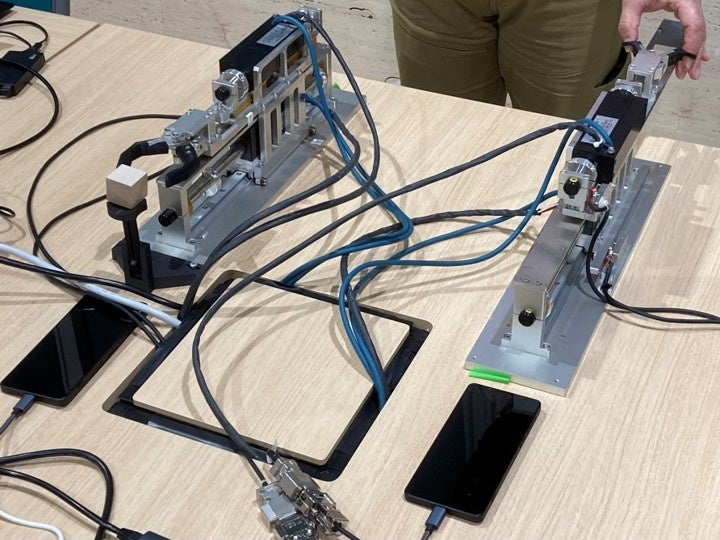
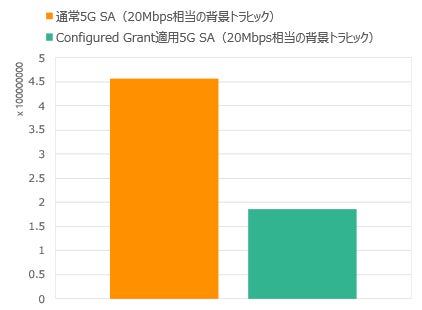
本実験では、ハンド型のフォロワーとその操作部であるリーダーを用いて、硬い木片を把持したあと、ハンドを素早く操作して印加する力を変動させながら定められた時間内に運搬するという定型的なタスクを、Configured Grantを入れた5G SAを利用した場合、Configured Grantを入れていない通常の5G SAを利用した場合の2通りで実施し、両者の違いを比較しました(図3)。
4. 結果
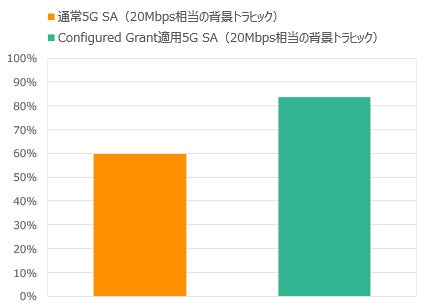
Configured Grantを入れた5G SAの場合、Configured Grantを入れていない通常の5G SAと比較して、平均通信遅延および遅延の変動の度合いを表す標準偏差が低下し、リアルハプティクスロボットの実用的な遠隔操作に求められる通信遅延要件を達成しました。また、遅延特性の改善に伴って、リアルハプティクスのロボット操作の性能を表す指標において性能向上を確認しました。力触覚再現率※8では、Configured Grant適用の場合、指標値が40%(24ポイント)向上し、高い精度の手応えのフィードバックが得られることを確認しました(図4)。ロボット操作の滑らかさ指標(無次元Jerk Cost※9)では、Configured Grant適用の場合、指標値が59%低下し、よりガタツキなく滑らかにロボットを操作できることを確認しました(図5)。
※6 超低遅延のモバイルデータ通信と、力覚・触覚対応ロボットの遠隔操作およびAI制御を組み合わせてサービスを提供する
プラットフォームサービス
※7 5G 時代に求められる MEC(Multi‐access Edge Computing)の特長である、低遅延、高セキュリティなどの機能を持
つドコモのクラウドサービス
※8 一方のロボットにかかる作用力をもう一方のロボットでどれだけ再現できているかの度合いを表したもの。値が100%に近
いほど、力加減の再現性が高いことを意味する
※9 ロボットの動作の滑らかさを加速度変化の程度で表した指標。値が小さいほど、より滑らかな動作であることを意味する
*「docomo MEC」は株式会社NTTドコモの登録商標です。
*「docomo MEC」は株式会社NTTドコモが提供元であり、NTTドコモビジネス株式会社が代理人として保有する契約締結権限、および包括的な業務受託にもとづき販売しています。
*「Bilateral Edge Platform」は株式会社NTTドコモの商標です。
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像