【初公開】JR 西日本 × 日本信号 × 人機一体 による「人機プラットフォーム」を活用した汎用人型重機「空間重作業人機」開発プロジェクトが始動します
人機一体社が目指す「先端ロボット工学技術の社会実装」の先陣を切り、「空間重作業人機社会実装プラットフォーム」が今、東日本大震災 10 年の福島ロボットテストフィールドから始まります。
力制御技術、パワー増幅バイラテラル制御技術を中心に、先端ロボット工学に関するコア技術の知的財産を多数保有する株式会社人機一体と、西日本旅客鉄道株式会社、日本信号株式会社の3社は、人機一体社のビジネスモデル「人機プラットフォーム」の一つである「空間重作業人機社会実装プラットフォーム」において、先端ロボット工学技術に基づく高所重作業対応の汎用人型重機「空間重作業人機」の社会実装に向けた開発プロジェクトを、2021/04 月より開始いたします。
※ 株式会社人機一体 本社:滋賀県草津市、代表取締役社長:金岡博士、以下「人機社」
※ 西日本旅客鉄道株式会社 本社:大阪市北区、代表取締役社長:長谷川 一明、以下「JR 西日本」
※ 日本信号株式会社 本社:東京都千代田区、代表取締役社長:塚本 英彦、以下「日本信号」
この開発プロジェクトに先立ち人機社は、空間重作業人機の PoC 試作機である 零式人機 ver.1.0 を 2021/03/18-19 ロボテス EXPO 2021 @ 福島ロボットテストフィールド にて初公開しました(下写真)。これをキックオフとし、人機社は JR 西日本、日本信号と共に空間重作業人機の早期の製品化を目指した開発プロジェクトを開始します。
※ PoC = Proof of Concept、概念実証
 三社連携キックオフ @ 福島ロボットテストフィールド
三社連携キックオフ @ 福島ロボットテストフィールド
JR 西日本 執行役員 鉄道本部 電気部長 三津野 隆宏 様(株式会社人機一体 取締役、写真右)
日本信号株式会社 代表取締役社長 塚本 英彦 様(写真左)
株式会社人機一体 代表取締役社長 金岡博士 (写真中央)
■ 背景
金岡博士は、立命館大学ロボティクス学科の教員を務めていた時代から二十年近くに亘って独自の先端ロボット工学技術を蓄積してきました。これらの先端ロボット工学技術の社会実装を目指して設立した人機社では、人機プラットフォームという独自のビジネスモデルを構築し、着実に社会実装への準備を進めています。
一方、JR 西日本グループは中期経営計画 2022 で「メンテナンスのシステムチェンジ」を掲げ、安全な鉄道・交通サービスの持続的な提供に向けて新しいメンテナンス手法への転換に挑戦しています。JR 西日本グループは人機社と「機械化・身体能力拡張」という軸でのメンテナンスの高度化も進めるとしており、身体能力拡張によるメンテナンス手法の革新が実現すれば作業効率と安全性が高まるだけでなく、人の労働価値の向上にも繋がります。
日本信号は、JR 西日本と既に資本業務提携契約を締結しており、鉄道の安全性のさらなる向上、工事・オペレーション・メンテナンスの効率化およびシステムの全体最適化を図ることを目指しています。
この三社が連携することにより、人機社の保有する革新的技術、日本信号のメカトロニクス技術と製品化のためのリソース、そして JR 西日本のメンテナンスの課題、それぞれが繋がり新規市場が形成され、三社のビジネスを加速することが期待されます。
■ 人機社の先端ロボット工学技術
人機社の独自技術を導入したロボットは、主に以下の特徴を持ちます。
- ローレベルに力制御・トルク制御が理想的な形で実装されており、サイバーフィジカルインタフェースとして、人・ロボット・環境間の柔らかな力学的相互作用を実現することができる
- 力制御・トルク制御の理想的な実装により、力学ベースの汎用ロボット制御技術をいくらでも重ね合わせて同時実装することができる
- マンマシンシナジーエフェクタ(人間機械相乗効果器)として、力の相互作用をベースに、操作者が自在にロボットを操り、またロボットの感覚を操作者が感じることができる。
そして、従来のロボットが抱える以下の問題を、人機社の技術を使うことで、社会実装レベルで全て解決することができます。
- 自動・自律、AI ベースでは「未知環境(現場)での汎用・非定型作業」ができない
- 外界との接触を伴う力学的相互作用を、一般的な「固い」位置制御で実行することは難しい
- 物理的な「力」を自在に操ることができない
- 衝突・摩擦などの外部からのイレギュラーな衝撃・干渉に弱い
人機社は、独自の「人型重機を造れるほどの先端ロボット工学技術に関する知的財産」(下図参照)を、人機プラットフォームという独自ビジネスモデルを利用して最大限に活用することにより、これまで「自動化」は不可能と思われてきた現場の「機械化」を実現します。
 人機社の独自技術概観
人機社の独自技術概観
■ 人機社の独自ビジネスモデル:人機プラットフォーム
テック系ベンチャー・スタートアップのほとんどは、独自の研究開発によって自社製品を世に送り出すビジネススタイルですが、人機社は違います。在庫や生産ラインを抱えない、単なるファブレスメーカでもない、先端ロボット工学技術の新しいビジネスモデルとして「人機プラットフォーム」を構築します。
リソースのない人機社が無理にメーカとなってロボットを製造販売するのではなく、先端ロボット技術の知的財産権を武器に、従来技術では解決困難な課題を抱える企業様と連携し、課題解決に向けた枠組(プラットフォーム)を提供するビジネススタイルを標榜しております。
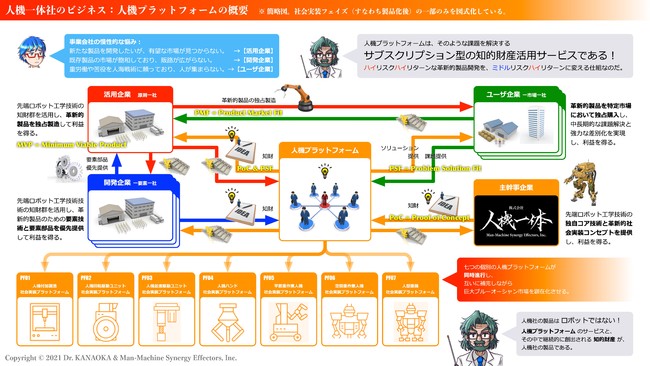 人機プラットフォームの概要
人機プラットフォームの概要
■ 空間重作業人機 社会実装プラットフォーム
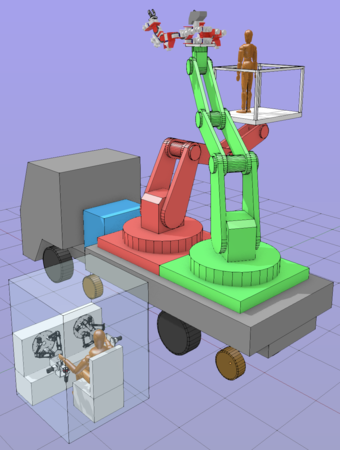 空間重作業人機の社会実装コンセプト
空間重作業人機の社会実装コンセプト
人機プラットフォームの中でも、特に空間重作業、すなわち高所での重作業を機械化することを目指し、組成されるプラットフォームです。人機社独自の力制御技術およびパワー増幅バイラテラル制御技術により、まるで自分が空間を自由に飛び回っているかのような感覚で、高所重作業ができるようになります。
このプラットフォームにおいてJR 西日本がユーザ企業、日本信号が活用企業をそれぞれ担っていただけることになり、人機プラットフォームが成立しました。
すなわち、人機社の独自技術を用いて、
日本信号がメーカとして独占的に高所重作業対応汎用人型重機「空間重作業人機」を開発・製造・販売し、
JR 西日本は課題解決を実現する製品を独占して購入する権利を得る、
という人機プラットフォームの仕組が、2021/04 月から動き出すこととなります。
■ 空間重作業人機 社会実装プラットフォームの「イメージを繋ぐ」コンセプトスケッチ
先のプレスリリースにてお伝えしたとおり、人機一体トータルブランドデザインプロジェクトが同時にスタートします。これは、znug design クリエイティブコミュニケーター / デザイナー 根津孝太氏と共に、人機社が進める汎用人型重機、そしてその上位の「人機一体」トータルブランドデザインを行なうプロジェクトです。
こちらもまずはキックオフとして、空間重作業人機 社会実装プラットフォーム についてのイメージイラストを作成することにしました。これが下の二枚組のイラストです。
 znug design 未来の「働く」を創る。作業機編
znug design 未来の「働く」を創る。作業機編
 znug design 未来の「働く」を創る。操作者編
znug design 未来の「働く」を創る。操作者編
この二枚組イラストに、我々が空間重作業人機社会実装プラットフォームで何がしたいのか、エッセンスが凝縮されています。我々は、作業性を上げ、効率よく働ける機械を「マンマシンシナジーエフェクタ」として開発しますが、それだけではありません。
我々は、人機プラットフォームに参加する企業(人機プラットフォーマ)と共に、未来の「働く」を創ります。
いつまでも多くの人が生身で、重作業、重筋作業に従事しているのは間違っている。人機プラットフォームは、まずは鉄道分野において、高所作業対応の汎用人型重機である 零式人機 を試作して有用性を確認し、近未来の「働く」の形を再デザインします。
 znug design 根津孝太様との連携
znug design 根津孝太様との連携
■ 出展イベント
ロボテス EXPO 2021
https://biz.nikkan.co.jp/robotes-expo/
◇ 会期:2021/03/18(木)〜19(金)10:30-16:30
◇ 会場:福島ロボットテストフィールド
福島県南相馬市原町区萱浜字新赤沼 83 番 南相馬市復興工業団地内
https://www.fipo.or.jp/robot/
◇ 主催:(公財)福島イノベーション・コースト構想推進機構
◇ 後援:(一社)日本 UAS 産業振興協議会
◇ 入場: 無料(事前登録制・抽選、締切済)
人機社は 2019 年から、福島県南相馬市の福島ロボットテストフィールド内に研究室を設け、人型重機関連技術の研究開発を行なってきました。
東日本大震災から 10 年。節目を迎える福島県南相馬市から、先端ロボット工学技術を多数組み込んだ高所重作業対応の汎用人型重機「空間重作業人機」を発信し、FUKUSHIMA の復興シンボルの一つとして世界にアピールしていきます。
■ 出展ロボット
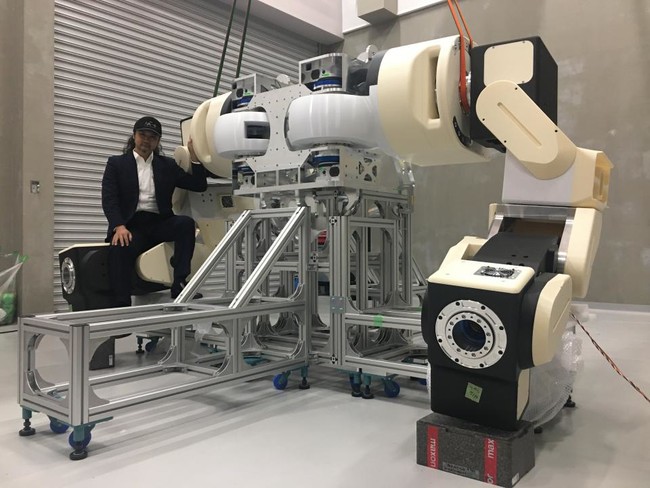
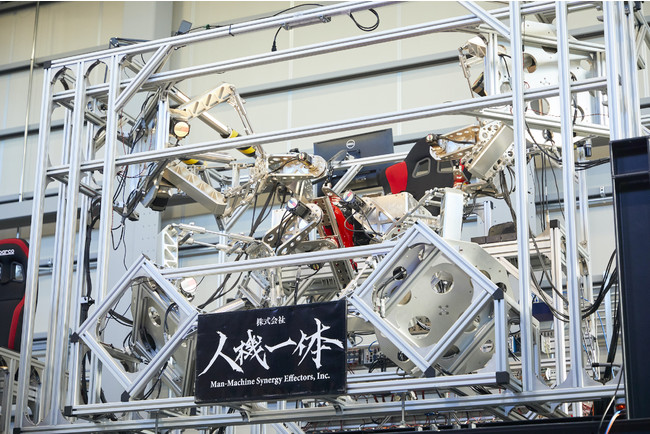
1.零式人機 ver.1.0【当日初公開】
高所重作業対応汎用人型重機「空間重作業人機」の PoC 試作機である。
実験的な先端技術を多数取り入れた、革新的な力制御パワー増幅システムとして成立している。
しかし、あくまで PoC 試作機であり、製品としては完成していない。今後の人機プラットフォームにおける連携の中で、JR 西日本、日本信号とともに早期の製品化を目指す。
 零式人機 ver.1.0
零式人機 ver.1.0
◀︎ ロボット名 = 零式人機 ver.1.0
読み = れいしきじんき
 零式人機 ver.1.0
零式人機 ver.1.0
 零式人機 ver.1.0
零式人機 ver.1.0
 零式人機 ver.1.0
零式人機 ver.1.0
▼ 零式人機 ver.1.0 へのパワー増幅バイラテラル制御の初期実装
2.零一式人機 ver.1.0【既出】
汎用人型重機「零一式人機」の初期試作機である。
 零一式人機 ver.1.0
零一式人機 ver.1.0
 零一式人機 ver.1.0
零一式人機 ver.1.0
▲ ロボット名 = 零一式人機 ver.1.0
読み = れいいちしきじんき
3.人機操作機 ver.3.2【既出、マイナーアップデート】
人機社の独自技術である力順送型バイラテラル制御の適用によって、従来技術での華奢な操作機とは異なり、非常に高剛性・高出力かつ繊細・巧緻な感覚まで伝達できる操作機である。今回の ver.3.2 では、既に発表済の ver.3.1 を零式人機 ver.1.0 に対応させるマイナーアップデートを行なった。
 人機操作機 ver.3.1
人機操作機 ver.3.1
 人機操作機 ver.3.1
人機操作機 ver.3.1
▲ ロボット名 = 人機操作機 ver.3.1
読み = じんきそうさき
■ 西日本旅客鉄道株式会社 = JR 西日本
社名:西日本旅客鉄道株式会社
代表者:代表取締役社長 長谷川 一明
所在地:〒530-8341 大阪市北区芝田二丁目 4 番 24 号
資本金:1,000 億円
事業内容:運輸業・流通業・不動産業・その他
公式ウェブサイト:https://www.westjr.co.jp/
■ 日本信号株式会社
鉄道をはじめとする交通インフラを支えるシステムおよび機器製造を行なうメーカ。鉄道・道路信号メーカとしては日本国内トップである。最近では、街の信号機や駅の自動改札機、駐車場のパーキングシステム、ロボット事業にも進出している。
社名:日本信号株式会社
代表者:代表取締役社長 塚本 英彦
所在地:〒100-6513 東京都千代田区丸の内 1-5-1 新丸の内ビルディング 13 階
資本金:100 億円
事業内容:鉄道信号事業・AFC 事業・スマートモビリティ事業・スマートシティ事業・国際事業
公式ウェブサイト:https://www.signal.co.jp/
■ 根津 孝太 氏 プロフィール
 znug design 根津孝太氏
znug design 根津孝太氏
1969 年東京生まれ。千葉大学工学部工業意匠学科卒業。トヨタ自動車入社、愛・地球博『i-unit』コンセプト開発リーダーなどを務める。2005 年有限会社 znug design 設立、多くの工業製品のコンセプト企画とデザインを手がけ、ものづくり企業の創造活動の活性化にも貢献。
「町工場から世界へ」を掲げた電動バイク『zecOO』、やわらかい布製超小型モビリティ『rimOnO』などのプロジェクトを推進する一方、GROOVE X『LOVOT』、トヨタ自動車コンセプトカー『Camatte』『Setsuna』、ダイハツ工業『COPEN』、THEMOS ケータイマグ『JMY』『JNL』『JNR』、Afternoon Tea ランチボックス『LUNCH WARE』、タミヤミニ四駆『Astralster』『RAIKIRI』などの開発も手がける。
グッドデザイン金賞 2020(経済産業大臣賞)(LOVOT)、CES 2020 INNOVATION AWARD(LOVOT)、COOL JAPAN AWARD 2019(LOVOT)、日本感性工学会 かわいい感性デザイン賞 2019 最優秀賞(LOVOT)、同 2016 最優秀賞(rimOnO)、JAPAN WOOD DESIGN AWARD 2016 最優秀賞(農林水産大臣賞)(Setsuna)、JIDA MUSEUM SELECTION 2015(zecOO)、ドイツ iF デザイン賞 2010(THERMOS JMY)、他多数受賞。
2014~2020 年度グッドデザイン賞審査委員。著書『アイデアは敵の中にある』(中央公論新社)、『カーデザインは未来を描く』(PLANETS)。
■ 有限会社 znug design
社名:有限会社 znug design(ツナグデザイン)
代表者:取締役 根津 孝太
所在地:東京都杉並区善福寺 3-22-10
事業内容:⼯業製品のコンセプト企画・デザイン、企業の創造活動の活性化
公式ウェブサイト:https://www.znug.com
ツイッター:https://twitter.com/kotanezu
フェイスブック:https://www.facebook.com/kota.nezu
■ 株式会社人機一体
金岡博士の理念と先端ロボット制御工学技術をコアに、パワー増幅バイラテラル制御システムとしての「人型重機」を開発・社会実装することにより「あまねく世界からフィジカルな苦役を無用とする」ことを目指す立命館大学発リアルテックベンチャー企業です。
フィジカルな苦役を無用とするためには「力学ベースの先端ロボット工学技術」の社会における広範な利用が不可欠であり、またそれによって十分に解決可能だと我々は考えます。しかし現状を鑑みると、ロボット工学技術が学術分野において膨大に蓄積されていく一方で、その社会実装は全く不十分です。
株式会社人機一体は「人型重機の社会実装」というシンボルプロジェクトを通してビジョンを強烈に訴え、力学ベースの先端ロボット工学技術の社会実装に突破口を開きます。
社名:株式会社人機一体
代表者:代表取締役社長 金岡博士(かなおかはかせ)
所在地:(本社)〒525-0041 滋賀県草津市青地町 648-1 秘密基地人機一体
(支社)〒975-0036
福島県南相馬市原町区萱浜字新赤沼 83 番
福島ロボットテストフィールド 研究棟 研究室 10
株式会社人機一体 福島基地
資本金:1 億 7300 万円
事業内容:先端ロボット工学技術の社会実装
公式ウェブサイト:http://www.jinki.jp/
電子メール:contact@jinki.jp
ツイッター:https://twitter.com/mmseinc
フェイスブック:https://www.facebook.com/mmseinc
■ 関連プレスリリース
【告知】JR 西日本 × 日本信号 × 人機一体 による「人機プラットフォーム」を活用した
「人型重機」開発プロジェクトが、ロボテス EXPO 2021 にて始動します
https://prtimes.jp/main/html/rd/p/000000003.000070266.html
【告知】znug design × 人機一体 による「人型重機」コンセプトデザイン
および「人機一体」トータルブランドデザインプロジェクトが、ロボテス EXPO 2021 にて始動します
https://prtimes.jp/main/html/rd/p/000000005.000070266.html
以上
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
