建設現場の自動化に貢献、油圧ショベルの積み込みタスク自動化の開発に成功
油圧ショベルが自律的に掘削し、ダンプトラックへ積み込む実証実験に成功。メーカー、機種を問わずに既存の建機に後付け可能。2021年中に本システムの建設現場への実証導入を目指す。
建設現場のDX・自動化を目指す東京大学発スタートアップのARAV株式会社(東京都文京区)は、合同会社ビスペル(静岡県富士市)と共同で、油圧ショベルによる掘削からダンプトラックへの積み込み動作までを自律的に行う実証実験に成功、本システムの事業化を開始致しました。本実証事業は内閣府及び準天頂衛星システムサービス株式会社の「2020年度みちびきを利用した実証事業」に採択されたもので、準天頂衛星みちびきのセンチメータ級測位補強サービスを活用し評価試験を実施しました。
【紹介動画】
以下の動画から、油圧ショベルの積み込みタスク自動化の動作をご覧頂けます。
https://youtu.be/p4fJiivjuY0
【本システムの構成】
「建機・周辺環境の状態認識」と「掘削・積み込み動作の生成と実行」を繰り返すことで、自律的な掘削・積み込みが可能なシステムを構築しています。
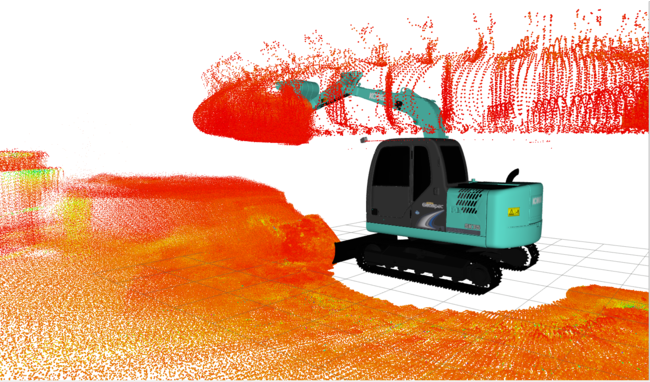
建機・周辺環境の状態認識については、姿勢センサやGNSS, 3D LiDAR等の複数センサにより状態の観測を行いARAVの技術により統合に成功。リアルタイムでの観測データの可視化も実現しました。
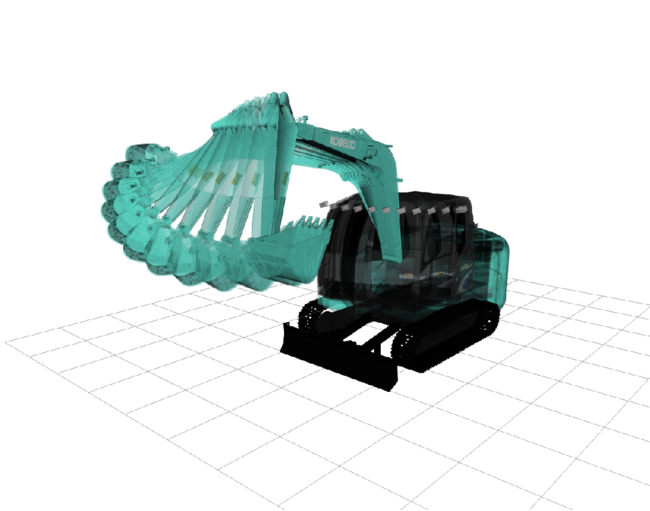
掘削・積み込み動作の生成と実行についてはARAVのモーションプランニング技術により、掘削すべきポイントや積み込みポイントへの動きについて自律的に計算され、動作が生成・実行されます。
【本システムの展望】
ARAVでは、2021年中に本システムの建設現場への実証導入を目指しています。特に繰り返し動作が過酷な残土積み込みタスクを対象として、自動積み込み油圧ショベルのサービス展開を進めます。このシステムを活用することにより、より少ない人数で今までの作業を行うことが可能です。安全作業の実現、現場のオペレーター不足といった課題へ貢献致します。
【実証実験パートナー募集のお知らせ】
ARAV株式会社は建設機械の自動化・遠隔化の共同実証実験パートナーを募集しています。
【お問い合わせ】
本件に関するお問い合わせはARAV株式会社公式WEBサイトまでお願い致します。
https://arav.jp/
以下の動画から、油圧ショベルの積み込みタスク自動化の動作をご覧頂けます。
https://youtu.be/p4fJiivjuY0
動画でご紹介している実証実験は、有人操作のダンプトラックの動作を検知し、有人操作の油圧ショベルから受け取った残土を、無人の自動運転機能を搭載した油圧ショベルにより、全自動で繰り返しダンプトラックに載せる検証シナリオです。
【本システムの構成】
「建機・周辺環境の状態認識」と「掘削・積み込み動作の生成と実行」を繰り返すことで、自律的な掘削・積み込みが可能なシステムを構築しています。
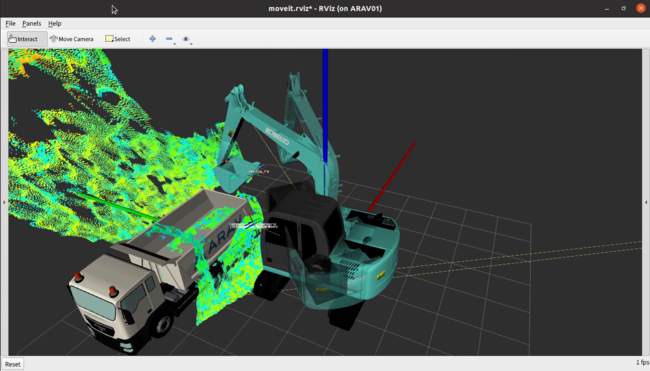
建機・周辺環境の状態認識については、姿勢センサやGNSS, 3D LiDAR等の複数センサにより状態の観測を行いARAVの技術により統合に成功。リアルタイムでの観測データの可視化も実現しました。
掘削・積み込み動作の生成と実行についてはARAVのモーションプランニング技術により、掘削すべきポイントや積み込みポイントへの動きについて自律的に計算され、動作が生成・実行されます。
【本システムの展望】
ARAVでは、2021年中に本システムの建設現場への実証導入を目指しています。特に繰り返し動作が過酷な残土積み込みタスクを対象として、自動積み込み油圧ショベルのサービス展開を進めます。このシステムを活用することにより、より少ない人数で今までの作業を行うことが可能です。安全作業の実現、現場のオペレーター不足といった課題へ貢献致します。
【実証実験パートナー募集のお知らせ】
ARAV株式会社は建設機械の自動化・遠隔化の共同実証実験パートナーを募集しています。
【お問い合わせ】
本件に関するお問い合わせはARAV株式会社公式WEBサイトまでお願い致します。
https://arav.jp/
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザーログイン既に登録済みの方はこちら
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
