自動運転向けリスクアセスメントに貢献する自己位置推定評価技術を開発
株式会社マップフォー(本社:愛知県名古屋市、代表取締役:橘川 雄樹)は、名古屋大学、名城大学、アイサンテクノロジー株式会社、株式会社ティアフォーと共同で、自動運転システムにおける自己位置推定※1評価技術を開発しました。





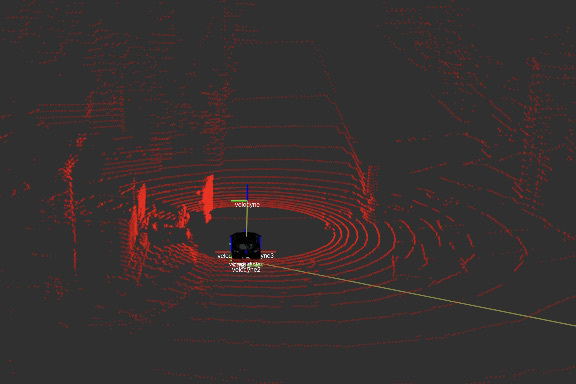
本技術では、シミュレーション環境において、走行環境を高精度3次元地図※2から仮想的に復元し、LiDARを始めとした車両搭載センサ情報を、実環境で想定される誤差を含めた状態で生成することによって、自動運転システムにおいて最も重要な機能の一つである位置推定の信頼性や精度を評価することが可能です。また、広く活用されているオープンソース自動運転ソフトウェアAutoware※3とも連携し、センサの性能・設置位置を変化させたり、渋滞を始めとした走行環境の変化も模擬したりすることで、実際の走行では取得困難な様々なケースを想定した事前評価にも活用できます。
今回開発した位置推定評価技術は、自動運転走行前の事故予防を支援するリスクアセスメントに活用でき、安心・安全な自動運転サービスに大きく貢献をすることができます。
なお、本技術は損害保険ジャパン株式会社、アイサンテクノロジー株式会社、株式会社ティアフォーが開発した「自動運転向けデジタルリスクアセスメント」※4に活用されています。

[本件に関するお問い合わせ先]
株式会社マップフォー広報担当
Email: map4-office@tier4.jp
※1 自動運転において、自車両が走行している位置及び姿勢を推定する技術。
※2 Mobile Mapping System等で計測された、高精度な位置情報が付与された地図データ。
※3 Autowareは、The Autoware Foundation の商標です。
※4 プレスリリース https://www.sompo-japan.co.jp/-/media/SJNK/files/news/2021/20210518_1.pdf
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザーログイン既に登録済みの方はこちら
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
- 種類
- その他
- ビジネスカテゴリ
- システム・Webサイト・アプリ開発パソコンソフトウェア
- 関連リンク
- https://www.map4.jp
- ダウンロード