DOBOT社製協働ロボットアーム「MG400」を活用した自律タスクデモの開発を開始
オープンソースロボティクス基盤LeRobotによるフィジカルAI実装を加速
■ 概要
株式会社EmplifAI(本社:東京都千代田区、代表取締役:大曽根宏幸、以下「EmplifAI」)は、DOBOT社製協働ロボットアーム「MG400」を対象に、オープンソースロボティクス基盤「LeRobot」を活用した制御・学習スタック(以下「MG400 LeRobotスタック」)の開発を開始しました。
本プロジェクトは、DOBOT製品の国内正規代理店である株式会社アフレルより「DOBOT MG400」の貸出を受けて実施しています。
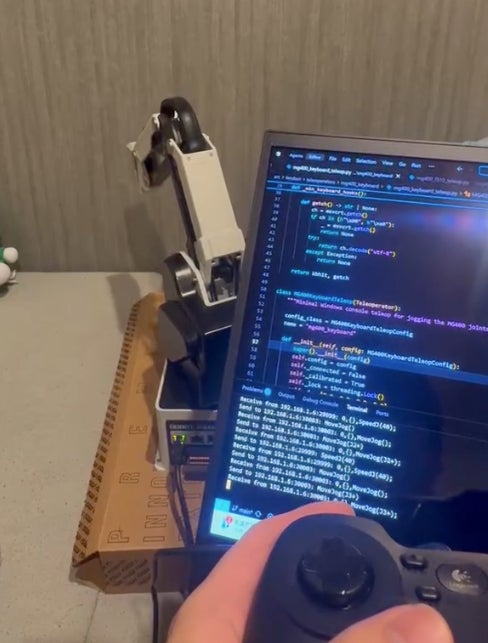
動作動画
https://x.com/OsoneHiroyuki/status/1983887256936202670?s=20
https://x.com/OsoneHiroyuki/status/1982661114577215642?s=20
本開発では、人間の操作データからロボットの振る舞いを学習させる「模倣学習」や強化学習を組み合わせることで、MG400が「現場の作業者のように考え、動く」フィジカルAIプラットフォームとして活用できることを目指します。
今後、実機デモや展示会での公開を視野に入れ、順次開発を進めてまいります。
■ 開発背景と目的
製造・物流・研究開発の現場では、人手不足とスキル継承の課題が顕在化しており、「プログラムを書ける人だけがロボットを動かせる」状況からの脱却が求められています。
一方で、協働ロボットアームは世界中で普及が進んでいるものの、メーカーごとにソフトウェアスタックが分断されており、AI・模倣学習との連携が難しいという課題が存在します。
EmplifAIは、ヒューマノイドや協働ロボットを対象としたフィジカルAI開発支援を行う中で、どのメーカーのロボットでも、同じようなワークフローで、データ収集から学習・デプロイまで一貫して扱える「マルチメーカー対応のロボット学習スタック」の必要性を強く感じました。
今回のプロジェクトでは、その第一歩として、コンパクトで扱いやすいDOBOT社MG400を対象に、オープンソースのロボティクスライブラリであるLeRobotと組み合わせた開発基盤の構築に取り組みます。
■ 「MG400 LeRobotスタック」の取り組み内容
本プロジェクトでは、以下のような機能群を備えた開発スタックの構築を進めています。
テレオペレーションによるデータ収集パイプライン
オペレータがMG400を直感的に操作し、その軌跡・関節角度・カメラ画像などを自動でログ化。
模倣学習・強化学習による政策(ポリシー)学習
収集したデータをLeRobot互換形式に変換し、物体把持・整列・簡易組立といったタスクの自律動作ポリシーを学習。
学習済みモデルのMG400実機へのデプロイ
学習済みポリシーをMG400の制御インターフェースに橋渡しし、実機上での動作検証・チューニングを行うためのインフラを整備。
マルチメーカー展開を見据えたアーキテクチャ
今回のMG400対応をベースとして、将来的に他社アームやヒューマノイドにも横展開できるよう、データ形式・API設計を共通化。
これにより、現場目線のフィジカルAI活用を実現していきます。
■ 株式会社EmplifAIについて
会社名:株式会社EmplifAI
所在地:〒101-0052 東京都千代田区神田小川町一丁目8番3号 小川町北ビル
代表者:代表取締役 大曽根 宏幸
事業内容:フィジカルAI・ロボティクス開発支援、AI制御アルゴリズム開発、ロボット導入・PoC支援、ヒューマノイドロボットレンタル、イベント出展 ほか
URL:https://emplif.ai/
■ 本件に関するお問い合わせ先
E-mail:support@emplif.ai
すべての画像