月極域探査機(LUPEX)ローバ地上システム向け運転支援システムの共同開発を開始
地上不整地環境向けセンシング技術開発のノウハウを生かし、月面探査ローバ向け安全運転支援システムの月極域探査機(LUPEX)ローバ地上システムへの適応試作を開始
パナソニック アドバンストテクノロジー株式会社は、国立研究開発法人 宇宙航空研究開発機構(JAXA)宇宙探査イノベーションハブとの「CG画像と少量データを用いた月面探査ローバ向け運転支援AIの試作」に関する共同研究の成果を活かし、月面探査ローバ向け安全運転支援システムを月極域探査機(LUPEX)ローバ地上システムへ適応試作する、三菱重工株式会社との共同開発を開始しました。
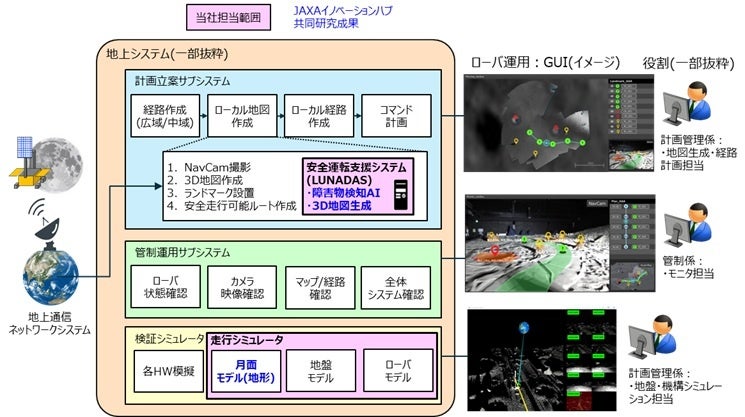
本共同開発は、JAXA宇宙探査イノベーションハブにて実施した共同研究※1の成果を活用しています。ステレオカメラを用いて月面探査ローバの安全な移動を妨げる岩石やクレータなどの障害物を検知するAIの性能を向上し、3D地図生成機能と月面探査ローバ向け走行シミュレータを組み合わせ、月面探査ローバ向け安全運転支援システムLUNADAS(LunarADAS)として構築しました。LUPEXローバ地上システムへ適用試作し、オペレータの月面環境認識を支援することで、ミッションの妨げとなる危険領域を回避し、安全な運転を支援するシステムの実現を目指します。


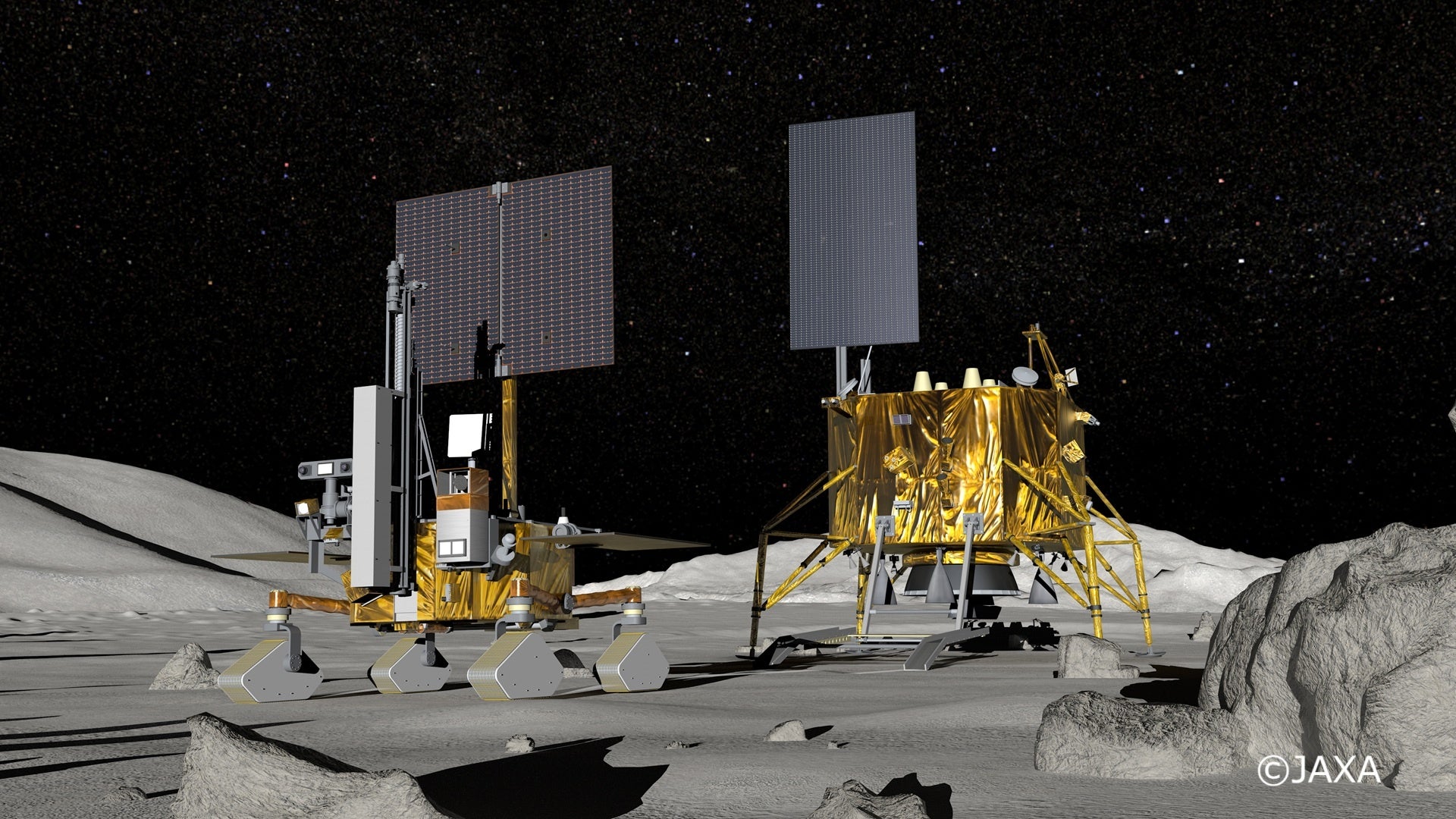
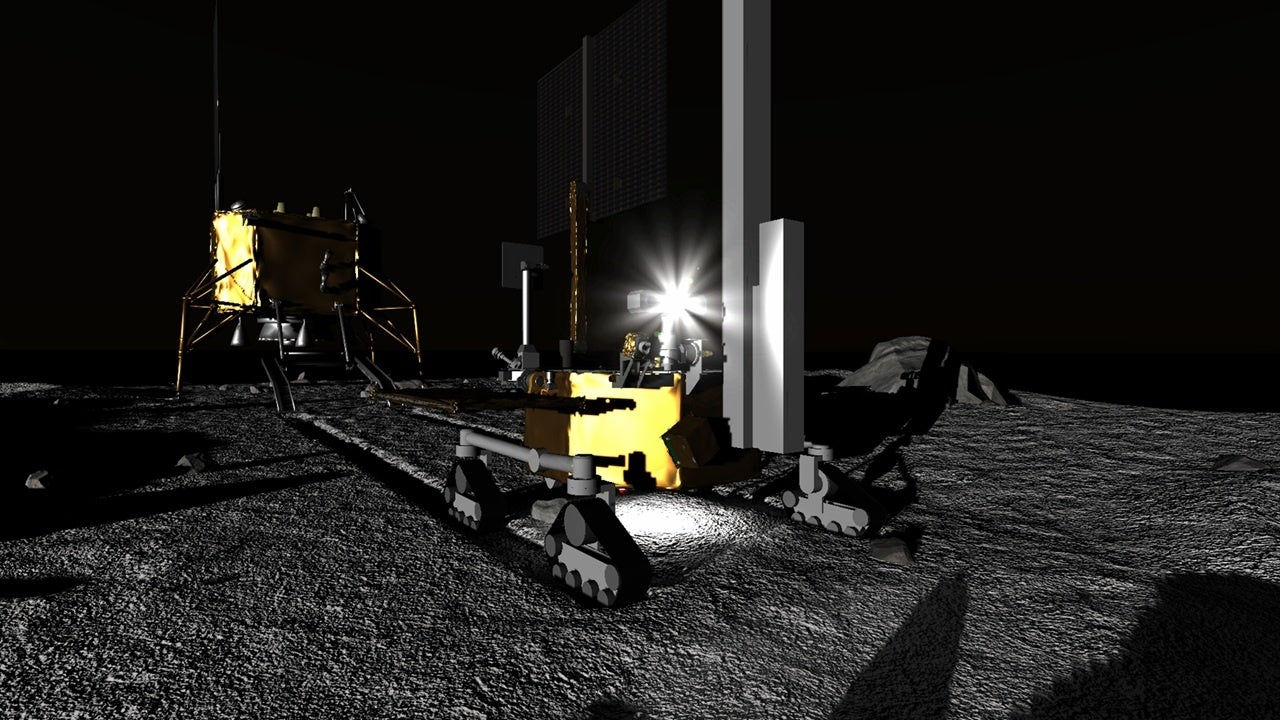
LUPEX※2は、JAXAとインド宇宙研究機関(ISRO)が共同で開発している、月の南極付近へ着陸し、水資源の探索を行う宇宙探査プロジェクトです。JAXAがH3ロケットによる打上げと月面探査ローバを、インドがローバを運ぶ着陸船の開発を担当しています。LUPEXローバは、月面を移動しながら、複数の地点を採掘し、どの場所にどの程度の量のどのような状態で水が存在しているのかを調べる計画です。

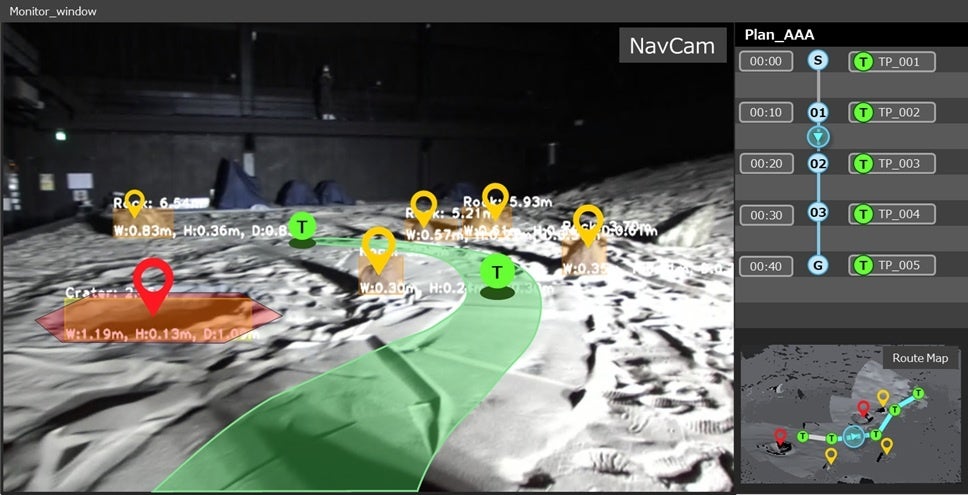
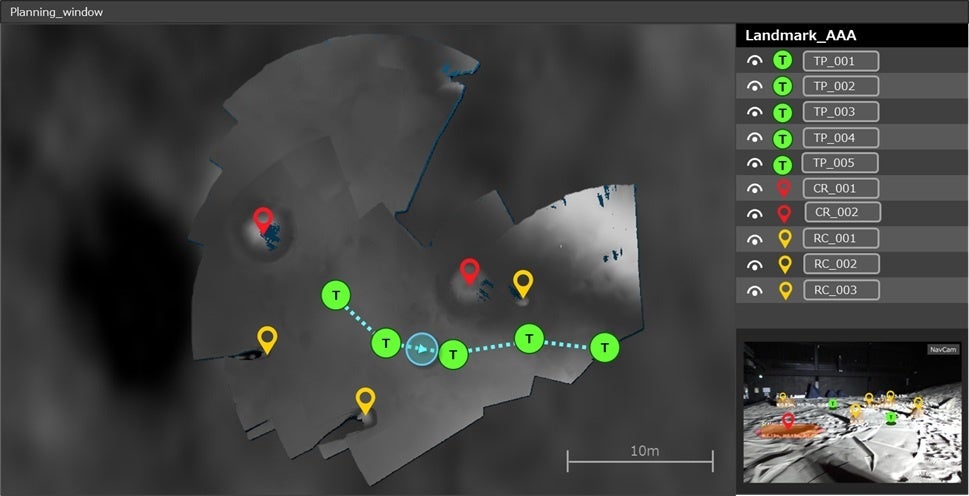
LUPEXローバは、地上からの遠隔操作で制御され、搭載センサにより周囲の環境を認識することで、安全な移動を妨げる障害物との衝突、転倒やスタックを引き起こすリスクのある地形を回避する必要があります。オペレーターは、限られた時間制約の中、常時見落としが許されない安全状態の監視をしながらの運用となるため、疲れにくく、理解し易い状態監視機能の提供が必要となります。そこで、地上不整地環境向けセンシング技術を生かした月面探査ローバ向け安全運転支援システム(LUNADAS)を適応し、AIによる障害物検知機能とローカル地図作成機能を組み合わせた周囲環境認識インタフェースの提供により、負荷低減を図ります。
私達は、月面を想定した周囲環境認識技術の研究開発のため、NASAの観測データ※3に基づく月面地形のモデリング、月面探査機の実撮影画像を参考にしたテクスチャの再現、NASAのSPICE(Spacecraft Planet Instrument C-matrix Events)組み込みによる太陽光の模擬※4等、ゲーム開発エンジンUnityを用いて仮想環境モデルのリアリティを向上して来ました。
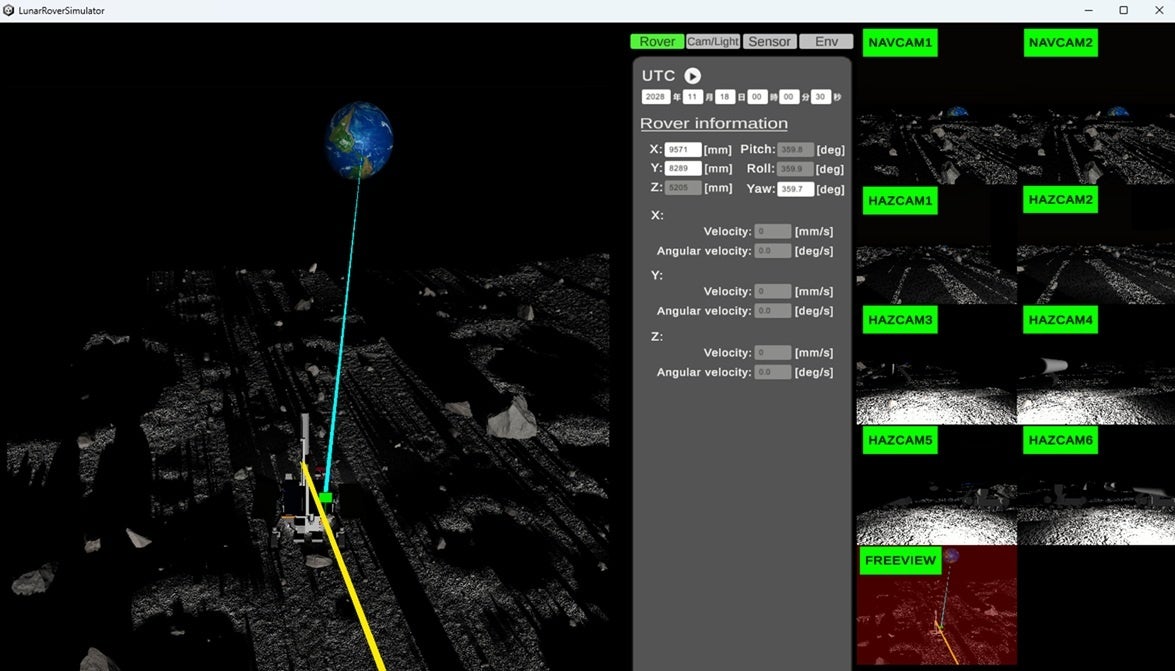
本共同開発では、各種カメラや照明のモデリングに加え、LUPEXローバが月面を走行した際の滑りや姿勢変動、スタックや轍の生成等、ローバと砂路面相互の挙動を再現するため、設計データに基づきLUPEXローバをモデリングし、物理エンジン(AGX Dynamics)を用いて砂路面での走行を模擬したLUPEXローバ走行シミュレータへの機能拡張を試行します。なお、月南極域の土壌パラメータは未知であるため、履帯に生じる摩擦角(φ)や粘着性(c)は可変とし、実証実験結果からのコリレーションを行うことを想定しています。

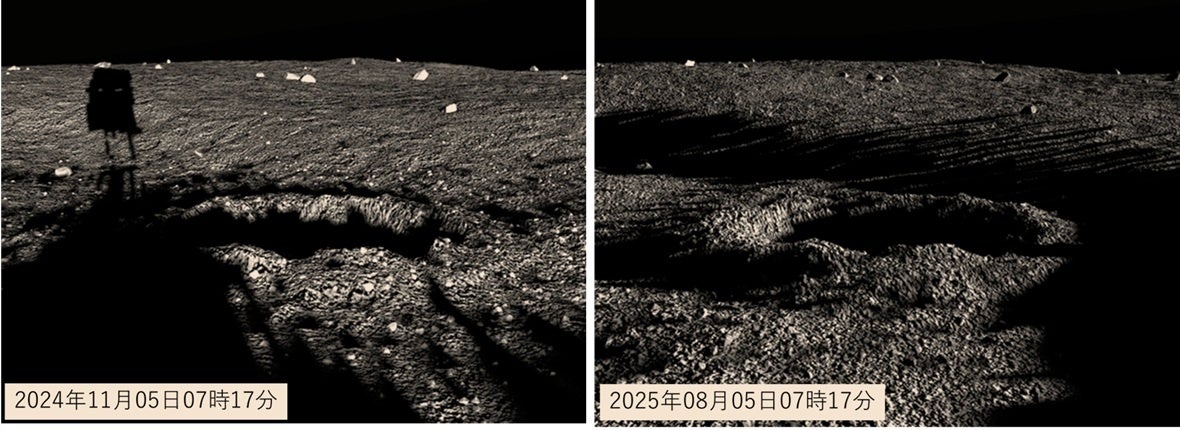
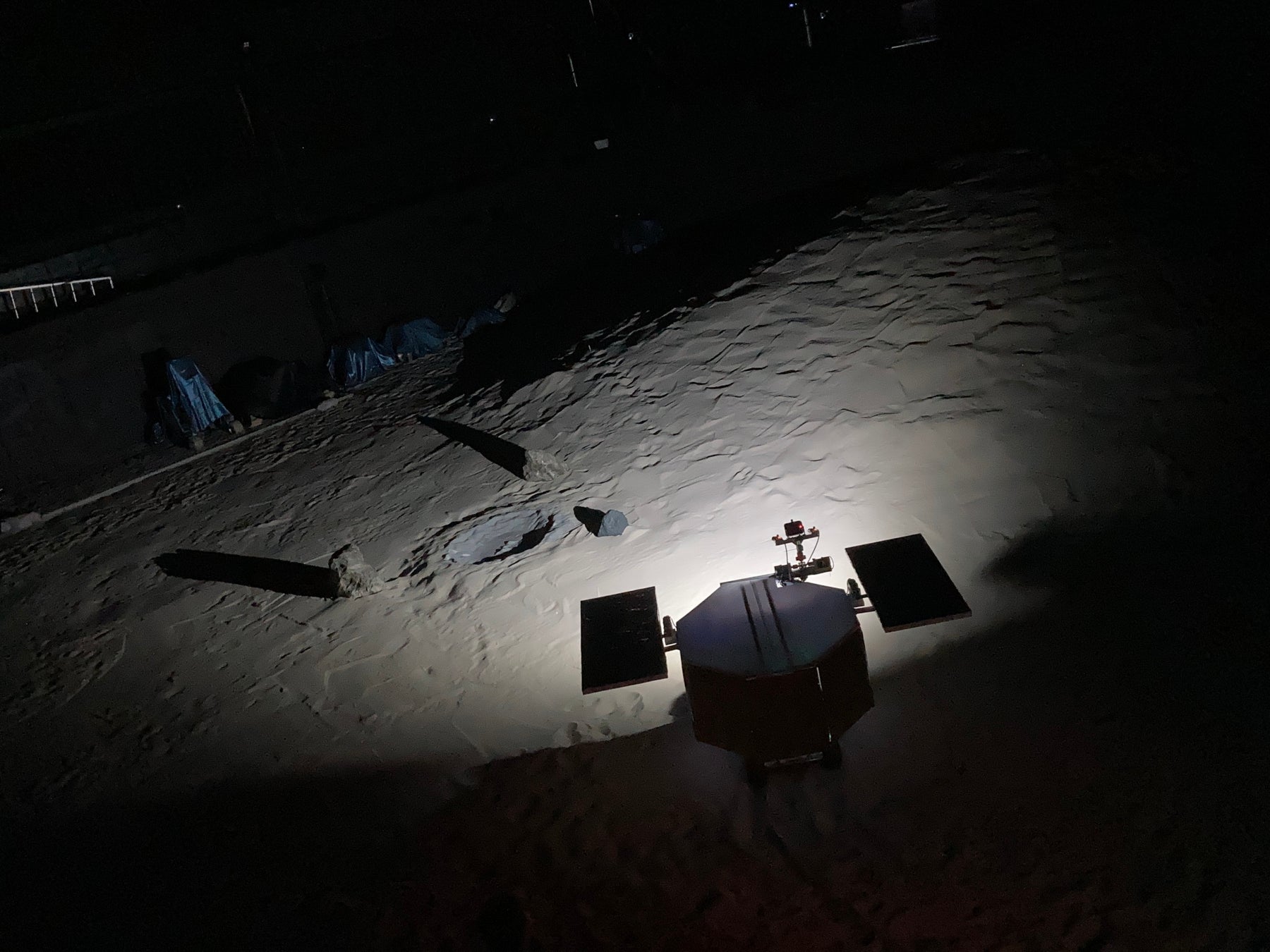
JAXA宇宙探査実験棟の宇宙探査フィールドの模擬月面環境で模擬ローバを使用した実証実験を行っています。月極域を想定し、永久影や横から差し込む太陽光を模擬した照明環境で、障害物検知と3D地図作成機能の性能、精度を検証し、性能改善を進めています。※5

本共同開発では、地上と宇宙の技術の双方利用を目的に、地上向けのセンシング技術の月極域探査機LUPEXローバの地上システムへの適応試作を実施しました。今後、さらなる性能改善、地上システムとの結合評価、シミュレータを用いた運用訓練と着実に開発を進め、宇宙探査技術の発展に貢献してまいります。
【注釈】
(※1):「少量データ向けCG合成画像を用いた物体検出深層学習手法の試行」
https://www.ihub-tansa.jaxa.jp/topics/RFP_announcement8.html
取り組み紹介動画1(Youtube):
https://www.youtube.com/watch?v=25eDuX1d6zY
インタビュー:
https://www.ihub-tansa.jaxa.jp/topics/interview_article_panasonic.html
取り組み紹介動画1(Youtube):
https://www.youtube.com/watch?v=25eDuX1d6zY
(※2):月極域探査機(LUPEX:Lunar Polar Exploration)プロジェクト
https://humans-in-space.jaxa.jp/biz-lab/tech/lupex/
(※3):South Pole Landing Site LOLA DEMs
https://pgda.gsfc.nasa.gov/data/LOLA_5mpp/
(※4):SPICE(Spacecraft Planet Instrument C-matrix Events)
https://naif.jpl.nasa.gov/naif/index.html
(※5):清水堅:月極域探査 地上向けセンシング技術のLUPEX地上システムへの適応試作、第69回宇宙科学技術連合講演会, 2025.
取り組み紹介動画2(Youtube):
https://channel.panasonic.com/jp/contents/44614/
【問い合わせ先】
パナソニック アドバンストテクノロジー株式会社
https://adtsd.jpn.panasonic.com/contact/
contact.pad@ml.jp.panasonic.com
パナソニック アドバンストテクノロジーについて
パナソニック アドバンストテクノロジー株式会社は、パナソニック ホールディングス株式会社の関連会社で、ソフトウェア/システム開発を主業務とする会社です。
2011年に発行された自動車機能安全規格ISO26262において、2012年にASIL D(Automotive Safety Integrity Level:自動車安全水準の最高ランクD)を認定取得しています。機能安全対応の車載ECU開発(自動駐車ECU/トランスミッション制御ECUなど)をはじめ、建設機械の自動運転、モノ搬送ロボットなどのモビリティ開発を多数手がけております。
また、モビリティ以外に住宅、ロボティクス、セキュリティ分野などでの技術開発、事業展開にも取り組んでいます。
すべての画像