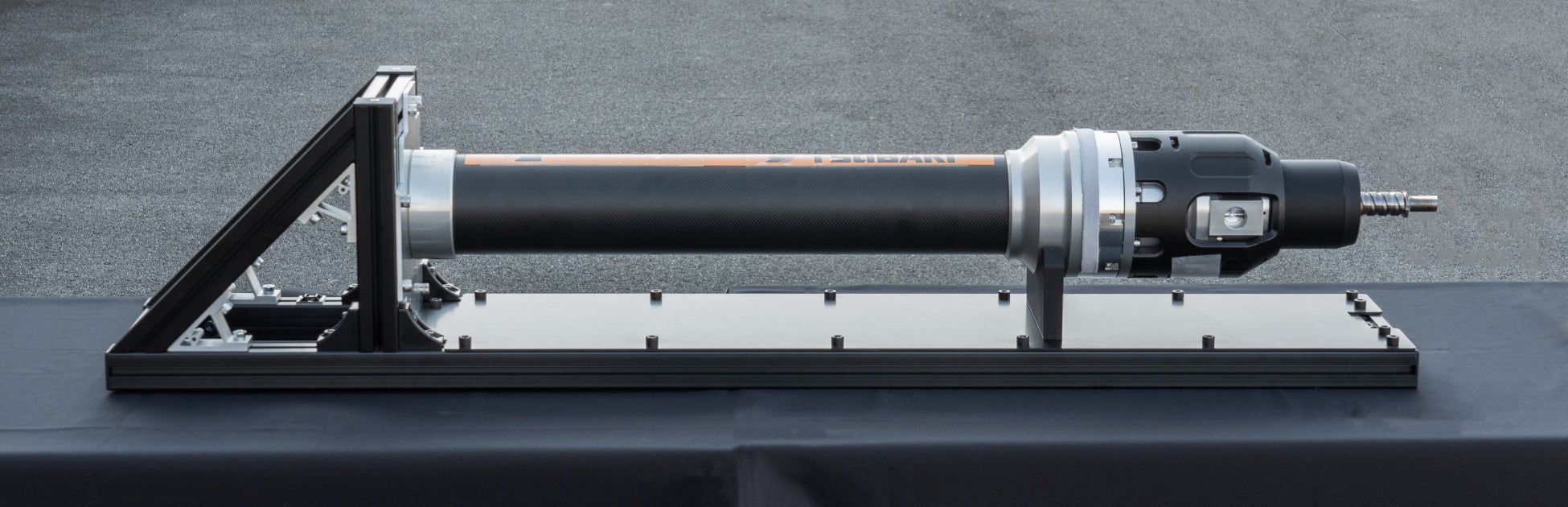
株式会社人機一体は、油圧シリンダの代替を可能とする力制御電動シリンダの PoC 試作機「人機並進駆動ユニット ver.5.0」を 2023 国際ロボット展にて初公開しました
椿本チエイン × タダノ × 人機一体による電動シリンダの共同開発成果の公開
※1 株式会社人機一体 本社:滋賀県草津市、代表取締役社長:金岡博士、以下「人機一体」
※2 株式会社椿本チエイン 本社:大阪市北区、代表取締役社長:木村隆利、以下「椿本チエイン」
※3 株式会社タダノ 本社:香川県高松市、代表取締役社長・CEO:氏家俊明、以下「タダノ」
人機並進駆動ユニット ver.5.0 の開発経緯
現在、ショベルやクレーンをはじめとした重機(建設機械)のアーム部分には油圧シリンダが搭載されています。油圧シリンダを用いた重機は、一般的な電動シリンダを用いた重機と比較して大きな出力を発揮することができ、高い耐衝撃性を持ちます。しかし、油圧機構の仕組上、緻密な力加減を要するような繊細な作業には不向きとされています。また、油漏れなどのリスクに対する環境配慮に向けた意識の高まりに伴い、電動シリンダへの期待も増しています。
そこで人機一体は、油圧シリンダの代替を可能とする高出力・高耐衝撃性を備えた力制御電動シリンダの社会実装を目指して独自に開発を開始し、原理試作としての PoC(※)試作機、人機並進駆動ユニット ver.4.0 までを開発しました。
その後、椿本チエインおよびタダノが人機並進駆動ユニット社会実装プラットフォームに参画し、社会実装コンセプトとしての PoC 試作機、人機並進駆動ユニット ver.5.0 の共同開発を開始しました。
※ PoC = Proof of Concept、概念実証
人機並進駆動ユニット ver.5.0 の特徴等
■ 性能・機能
人機一体独自の力制御技術を搭載した並進駆動アクチュエータ(電動シリンダ)であり、ボールネジ・ボールナット・中間減速機・モータを同軸直列に配置することで、1.5 トンの推力を有しながら、重量約 14 kg (ストローク 500 mm)に軽量化し、大幅なパワーウエイトレシオの改善を実現しました。

■ 特徴
人機一体独自の力制御技術「プロクシベースト・アドミタンス制御(PBAC)」を実装しており、油圧シリンダよりも力のコントロールが容易で巧緻な作業が可能でありながら油圧駆動に匹敵する耐衝撃性を持ち、硬い物体の掘削作業などを行なう重機にも適用することができます。また、従来機と比較し、油圧シリンダに近いパワーウエイトレシオを実現しており、大きな力から小さな力まで自在に安定して操ることができます。
■ 活用方法
ショベルやクレーンといった、油圧シリンダを用いる重機に適用し、重機の電動化および高度化を行ないます。人機一体の力制御技術を実装することで、上述した特徴に加えて脱炭素化や静音性の向上を実現したロボット重機を実現します。
人機並進駆動ユニット ver.5.0 の開発プラットフォーム
人機並進駆動ユニット ver.5.0 は、人機一体の独自ビジネスモデル「人機プラットフォーム」におけるプラットフォームの一つ、PF03 人機並進駆動ユニット社会実装プラットフォームにおいて 椿本チエイン、タダノ、および人機一体の 3 社が共同開発した社会実装コンセプトとしての PoC 試作機です。
人機プラットフォームは、力学ベースの先端ロボット工学技術に関する知的財産、技術の社会実装に必要な製品コンセプトの企画提案、および試作機開発をパッケージ化して提供する課題解決型サブスクリプションサービスであり、プラットフォーム参画企業である「人機プラットフォーマ」が主体的に研究開発に貢献しつつ、費用および役割を分担してリスク分散することで先端ロボット工学技術の社会実装を可能とする共創ビジネスモデルです。
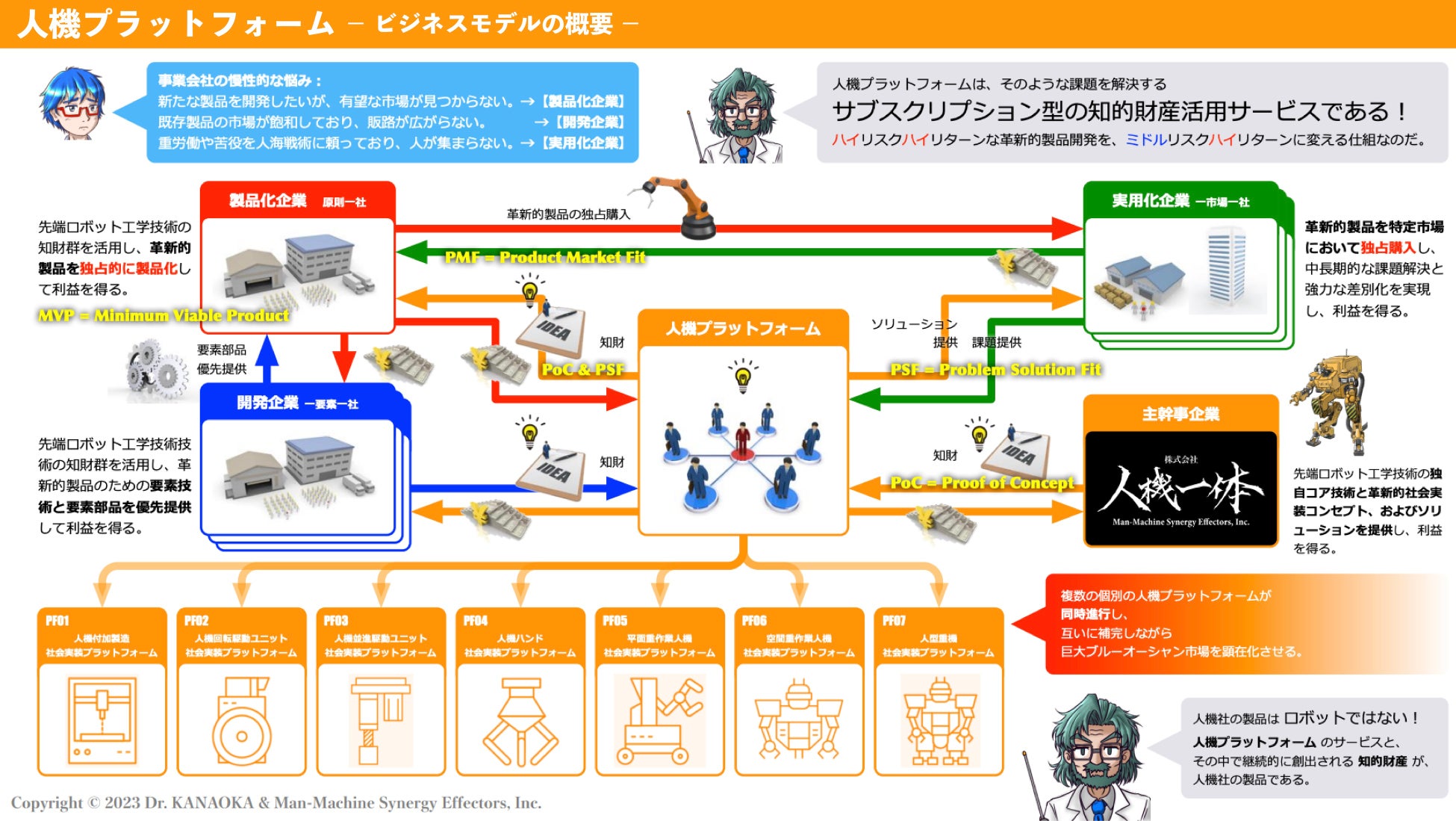 人機プラットフォームの概要
人機プラットフォームの概要
人機一体は、既存メーカと競合しながらロボット重機を製造販売するのではなく、先端ロボット工学技術の知的財産権を武器に、従来技術では解決困難な課題を抱える企業様と連携し、それぞれの得意分野を活かして課題解決に取り組んでいます。
今回の PF03 人機並進駆動ユニット社会実装プラットフォームにおいては、タダノが実用化企業となり、人機並進駆動ユニットを所定の分野で独占購入して自社のクレーン等の電動化・高機能化を実現し、椿本チエインが製品化企業として製品化を目指します。
2023 国際ロボット展での成果発表
2023 年11 月 29(水)から12 月 02 日(土) まで東京ビッグサイトで開催された「2023 国際ロボット展(iREX2023)」において初公開し、展示しました。

関連プレスリリース:
株式会社人機一体は、2023 国際ロボット展(リアル会場)に出展します
https://prtimes.jp/main/html/rd/p/000000029.000070266.html
関連情報
■ 株式会社椿本チエイン
社名 :株式会社椿本チエイン
代表者 :代表取締役社長 木村 隆利
所在地 :〒530-0005 大阪市北区中之島 3-3-3(中之島三井ビルディング)
資本金 :170 億 7,600 万円(2023 年 03 月末現在)
事業内容:チェーン、電動シリンダなど各種機械部品、自動車部品、および搬送システムの製造販売
公式ウェブサイト: https://www.tsubakimoto.jp/
■ 株式会社タダノ
社名 :株式会社タダノ
代表者 :代表取締役社長・CEO 氏家 俊明
所在地 :〒761-0185 香川県高松市新田町甲 34 番地
資本金 :130 億 2,156 万 8,461 円(2023 年 03 月末現在)
事業内容:建設用クレーン、車両搭載型クレーンおよび高所作業車等の製造販売
公式ウェブサイト:https://www.tadano.co.jp/index.html
■ 株式会社人機一体
先端ロボット工学技術を駆使した「人機」の実現により「あまねく世界からフィジカルな苦役を無用とする」ことを目指す立命館大学発ロボティクスベンチャー企業です。
フィジカルな苦役を無用とするためには「力学ベースの先端ロボット工学技術」の社会における広範な利用が不可欠であると我々は考えます。しかし現状を鑑みると、ロボット工学技術が学術分野において膨大に蓄積されていく一方で、社会実装される技術は極僅かです。
株式会社人機一体は、そのような有益でありながら社会実装されていない技術を集約・体系化し、独自の共創ビジネスモデル「人機プラットフォーム」を通じた企業連携により、力学ベースの先端ロボット工学技術の社会実装に突破口を開きます。

社名 :株式会社人機一体
代表者 :代表取締役社長 金岡博士
所在地 :(本社 秘密基地)
〒525-0041滋賀県草津市青地町 648-1
(支社 福島基地)
〒975-0036 福島県南相馬市原町区萱浜字巣掛場 45-245
南相馬市産業創造センター内
資本金 :1 億円(2023 年 11 月末現在)
事業内容:先端ロボット工学技術の知的財産を活用した課題解決型サービス
公式ウェブサイト:http://www.jinki.jp/
電子メール :contact@jinki.jp
X(Twitter) :https://twitter.com/mmseinc
フェイスブック :https://www.facebook.com/mmseinc
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
