【ポケット・クエリーズ × 鴻池組】切羽観察をロボットで革新!トンネル掘削の「危険作業ゼロ」へ挑戦
四足歩行ロボットによる自動化で、現場の安全確保と技能継承の両立を図る
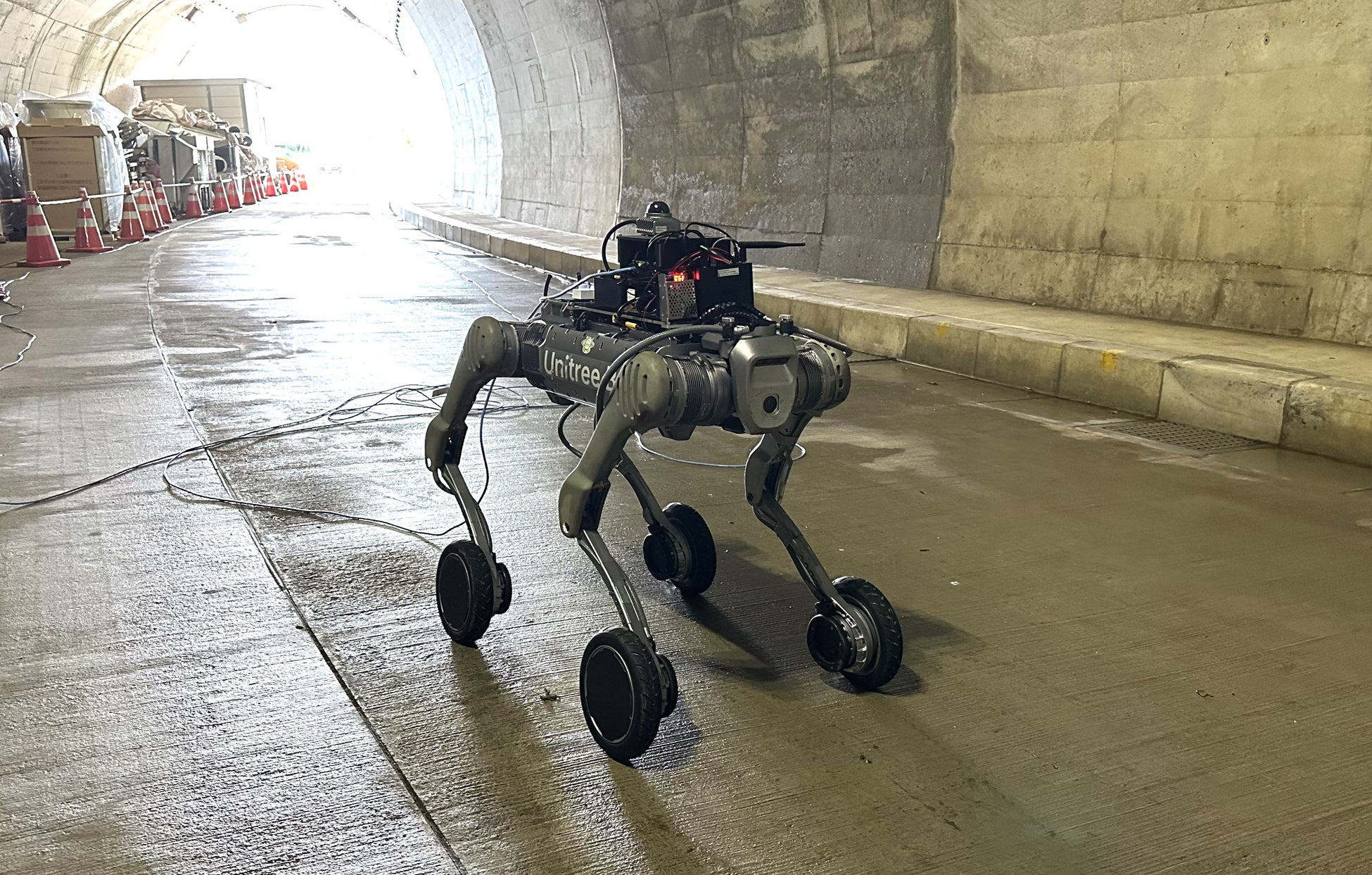
株式会社ポケット・クエリーズ(本社:東京都新宿区 代表:佐々木宣彦、以下当社)は、株式会社鴻池組(本社:大阪市中央区 代表:渡津 弘己)との共同プロジェクトとして、トンネル工事において崩落リスクの高い切羽(掘削最前線)に四足歩行ロボットを先行して投入し、従来は熟練作業員が担っていた現地観察業務を代替する自立型ロボットシステムの開発に着手しました。
本取り組みは、ライントレース機能による自律走行制御を活用し、危険性の高いトンネル掘削現場において、人間の代わりに四足歩行ロボットが状況観察を実施することを目的としています。
■背景と目的
トンネルの掘削現場では、コンクリート吹付けや支保工による補強処理前の切羽において、崩落や落石のリスクが常に存在します。特に観察作業は、長時間にわたり危険区域に滞在する必要があり、作業者の安全確保が大きな課題です。
さらに、切羽観察には高度な専門性と経験が求められるため、担い手不足が深刻化しており、観察ノウハウの継承も困難となっています。
こうした背景のもと、当社は危険作業の四足歩行ロボット代替によって、作業員の命を守るとともに、熟練者の知見を安全な環境下でデジタルに継承できる仕組みづくりに取り組みます。
この開発は、土木建設業界における労働力不足への対応、作業環境の安全性向上、ならびに現場技能の持続可能な継承という社会的課題の解決に寄与することを目指しています。
■取り組みの内容
現在検討中の四足歩行ロボットシステムは、各種センサー(LiDAR、カメラ、IMUなど)を組み合わせたライントレース機能を用い、自律的に現場を走行・観察できる設計を目指しています。
四足歩行ロボットは人間の代わりに切羽に進入し、状況を撮影・スキャン・記録。これにより、遠隔地の作業員が現場の状態を正確に把握でき、危険な場所に長時間滞在する必要がなくなります
今後は、共同開発パートナーである株式会社鴻池組と連携しながら、現場での実証実験を通じて、実用化を目指します。
実際のトンネル掘削現場での運用を見据え、四足歩行ロボットの走行性能や観察精度を高めつつ、過酷な環境でも安定して稼働できるよう現場ニーズに合わせた機能の追加や、運用面での調整・最適化を重ねて参ります。

株式会社ポケット・クエリーズ
ポケクエは第一線現場をお持ちのお客様が抱える『人財不足』をテーマに技能継承/省力化/多能工化を目的とした現場向けDXツールを多く開発。またこれらの領域に、生成AI技術を活用した技術検証・実運用を実現。
本 社 :東京都新宿区西新宿3-20-2 東京オペラシティタワー35F
代表者 :代表取締役社長 佐々木 宣彦
事業内容:ロボティクス/IoT事業,VR/AR/MRの実用アプリケーション開発,3D-CG事業
HP :http://www.pocket-queries.co.jp/
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
