【東大発数理アルゴリズムベンチャー】 2D画像データと3D点群データを組み合わせることで、段ボールの自動検出を行うセンシングシステムの開発に成功
数理アルゴリズム等の開発・提供を行うTRUST SMITH株式会社(本社:東京都文京区、代表:大澤 琢真、以下TRUST SMITH)は、段ボールを自動で検知するセンシングシステムを開発した。本技術は2D画像データと3D点群データを組み合わせることで実現し、製造・物流業界における労働力不足の補填や作業効率の向上を狙う。
- 本技術開発の背景

本技術は物流・製造現場における自動化を促進させ、時代のニーズに応えるシステムである。
- 本技術開発の特徴
・段ボールの位置や段ボールのサイズ・種類に関する事前情報の登録が不要
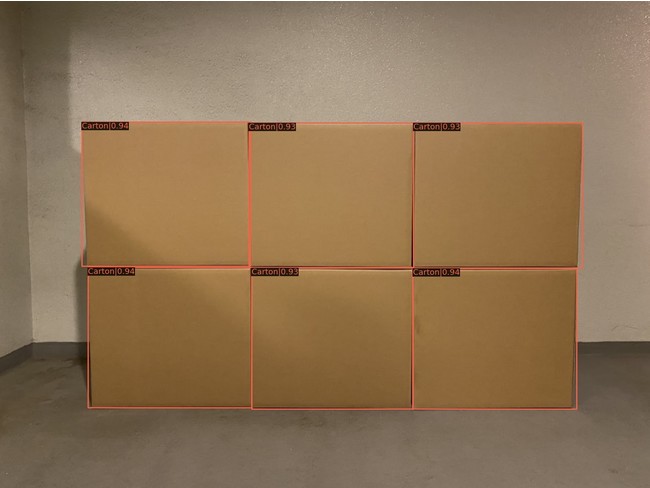 2次元センサーから取得した特徴を元にした矩形認識アルゴリズム
2次元センサーから取得した特徴を元にした矩形認識アルゴリズム
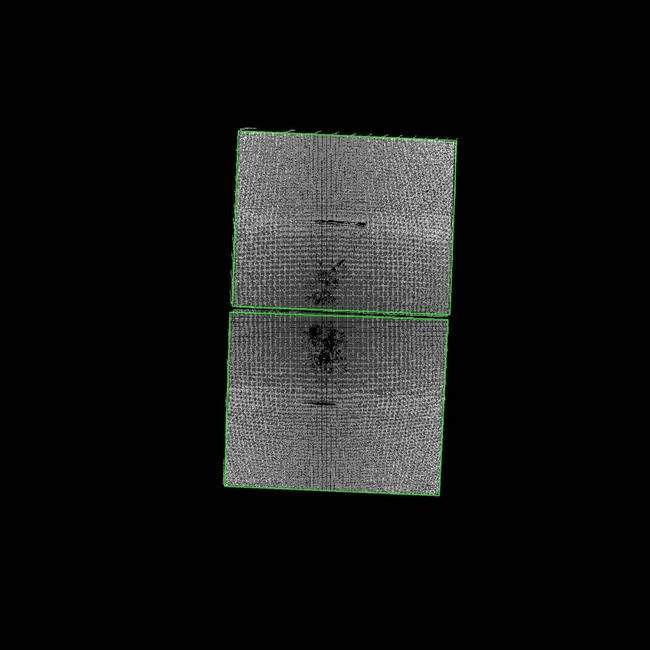 3次元センサーから取得した特徴を元にした矩形認識アルゴリズム
3次元センサーから取得した特徴を元にした矩形認識アルゴリズム
- 本技術の流れ

②カメラを用いて2次元画像と3次元画像データを得る
③独自のアルゴリズムにより段ボールを自動検出する
- 今後の展望

TRUST SMITHは、他にもロボットアーム経路生成アルゴリズムや、自動搬送ロボット、自動走行フォークリフトなどハードウェアを含めた研究開発に積極的に取り組んでいる。今後、このような様々な技術を組み合わせることにより、従来手作業で行われていた工場・倉庫内のあらゆる作業の省人化・無人化を目指す。
<関連プレスリリース>
・【東大発AIベンチャー】製造・物流現場における運搬業務を自動化、人と協働するロボットを開発
https://prtimes.jp/main/html/rd/p/000000041.000049040.html
・【東大発AIベンチャー】複数の自動運搬ロボットを同時に制御するシステムを開発
https://prtimes.jp/main/html/rd/p/000000044.000049040.html
・【東大発AIベンチャー】無人フォークリフトの開発に着手
https://prtimes.jp/main/html/rd/p/000000011.000063451.html
■SMITH&LOGISTICSについて

■TRUST SMITHについて

ハード・ソフト問わず、様々な技術領域において自社製品の研究開発に取り組むとともに、オーダーメイドで企業様の課題に合わせたソリューションの提供や研究のご支援を行っています。
■TRUST SMITH 会社概要
社名:TRUST SMITH株式会社
所在地:東京都文京区本郷4丁目1-1 菊花ビル7F
代表:大澤 琢真
事業内容:数理・物理アルゴリズム(AI)の開発
設立日:2019年1月18日
会社HP:https://www.trustsmith.net/
連絡先メールアドレス:office@trustsmith.net
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザーログイン既に登録済みの方はこちら
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
