人機一体と竹中土木が共同開発を進める、橋梁耐震補強用鋼製ブラケット取付ロボット「人機スチュワートプラットフォーム ver.2.0」を 2025 国際ロボット展にて出展します。
2023 国際ロボット展(iREX2023)でのソリューション提示から2年間の開発成果を公開します。
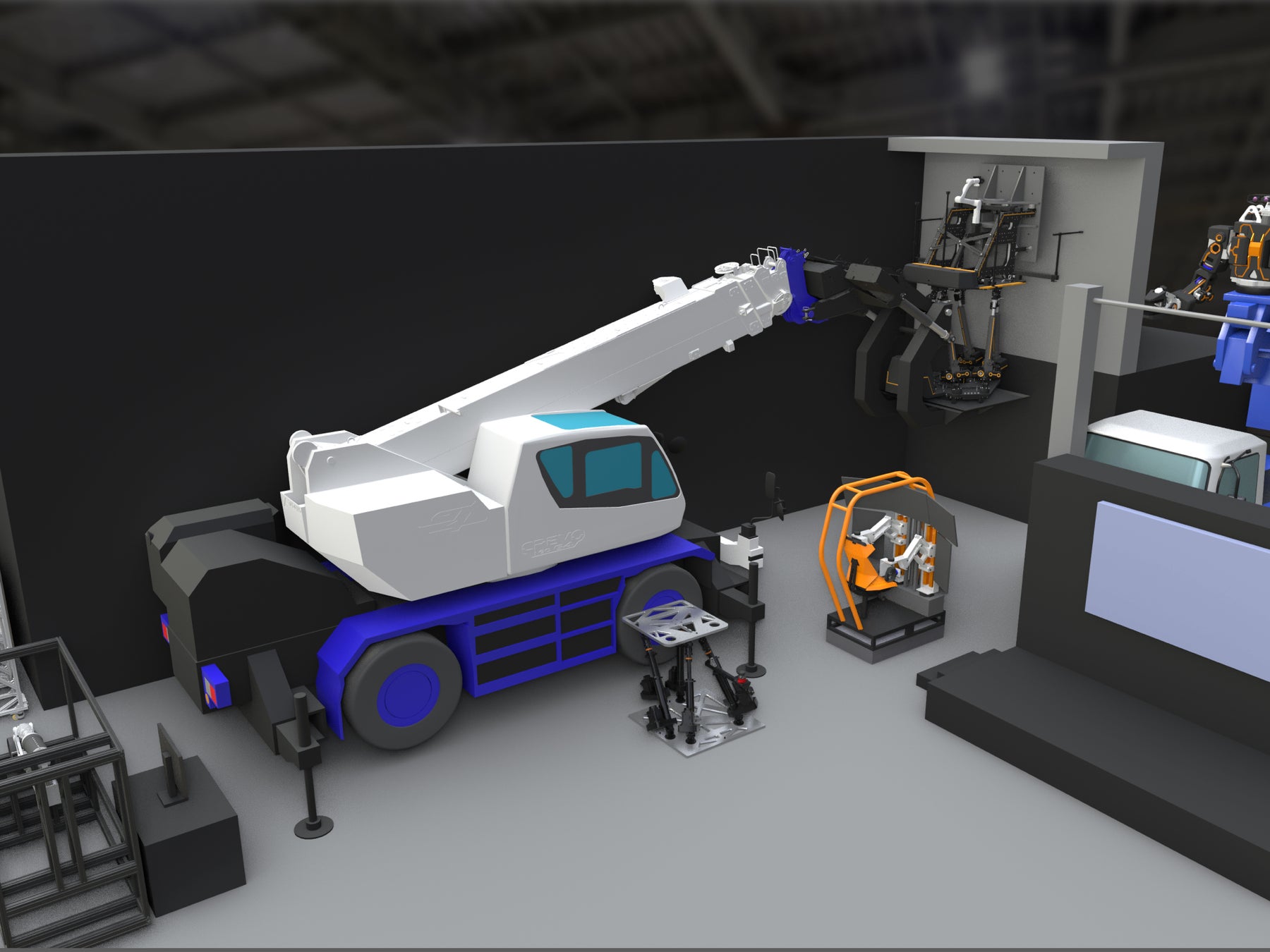
株式会社人機一体(本社:滋賀県草津市、代表取締役:金岡博士、以下「人機一体」)は、株式会社竹中土木(本社:東京都江東区、取締役社長:竹中 祥悟、以下「竹中土木」)と共同開発を進める、橋梁耐震補強用鋼製ブラケット(以下、鋼製ブラケット)取付ロボットの PoC(※1)試作機「人機スチュワートプラットフォーム ver.2.0(以下、人機 GSP ver.2.0 ※2)」を 2025 国際ロボット展にて出展します。スチュワートプラットフォームについては今年 10 月に開催されたハイウェイテクノフェア 2025 に続く 2 度目の公開ですが、現場での実用を見据えたロボットシステム全体として、揚重機械(ラフテレーンクレーン)に取り付けた状態での初公開となります。
※1 PoC = Proof of Concept、概念実証
※2 GSP = スチュワートプラットフォームの英語表記、Gough-Stewart Platform の略称

■ 開発背景
資本提携と共同開発の開始
人機一体と竹中土木は、2022 年 12 月に資本提携を実施しました。さらに竹中土木が「ロボットが拓く、新たな土木」をコンセプトに、土木現場でのロボット適用に向けて、人機一体による知的財産活用サービス「人機プラットフォーム」の 一つ「PF06 空間重作業人機社会実装プラットフォーム」に実用化企業として参画。人機一体と竹中土木は「橋梁耐震補強用鋼製ブラケットの取付作業」の機械化を目指し、同プラットフォームにて共同開発を進めてまいりました。

従来工法の課題
橋梁の耐震補強工事で桁下に鋼製ブラケットなどの重量物を取り付ける際、クレーンで持ち上げられる高さには限界があり、チェーンブロックで吊り上げてボルト位置に合わせて微調整するといった一連の作業を手作業で行なう必要があります。高所作業車上での人力作業のため、安全性の確保や作業効率の向上が長年の課題でした。

■ 2023 国際ロボット展にて、ソリューションを提示(人機 GSP ver.1.3)
2023 年 11 月の 2023 国際ロボット展(iREX2023)にて、当時人機一体が独自に開発を行なっていた原理試作としての PoC 試作機「人機スチュワートプラットフォーム ver.1.3」を用いて、耐震補強ブラケットの取付作業を模したデモンストレーションを実施。木製のモックアップではあるものの、人による直感的な操作で、短時間で取付作業を実現できることを示しました。

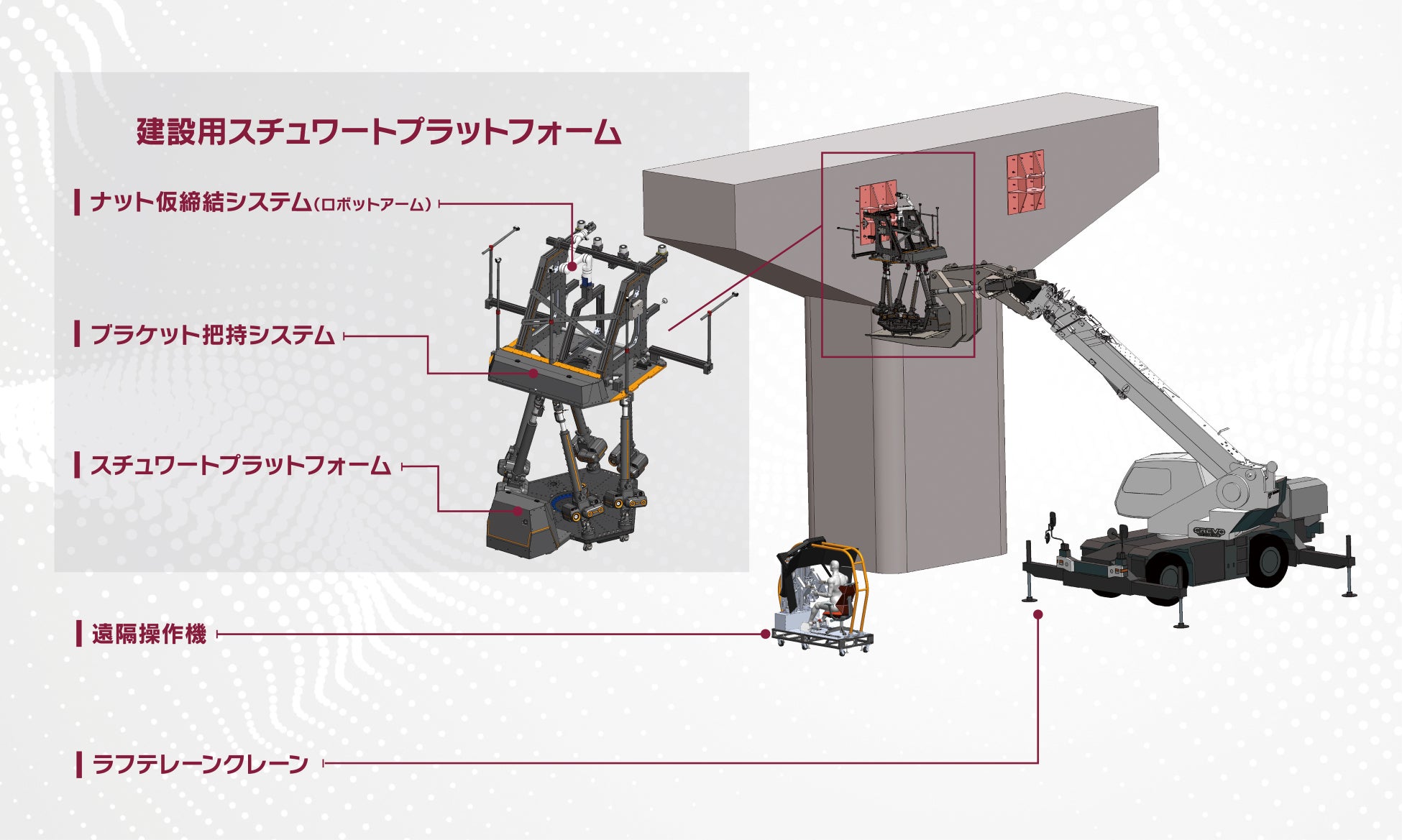
■ 実証試作機の概要(人機 GSP ver.2.0)
今回開発した人機 GSP ver.2.0 は、「ナット仮締結システム(ロボットアーム)」「ブラケット把持システム」「スチュワートプラットフォーム」から構成されており、クレーンなどの揚重機械のブーム先端に専用機械を用いて人機スチュワートプラットフォームを施工箇所まで接近しさせ、人機操作機から遠隔操作することでブラケットの位置・姿勢を自由自在に調整することができます。従来工法ではブラケット一つあたり約 120 分要していたところを、スチュワートプラットフォームを用いる新工法により約 30 分まで削減することを見込んでいます。
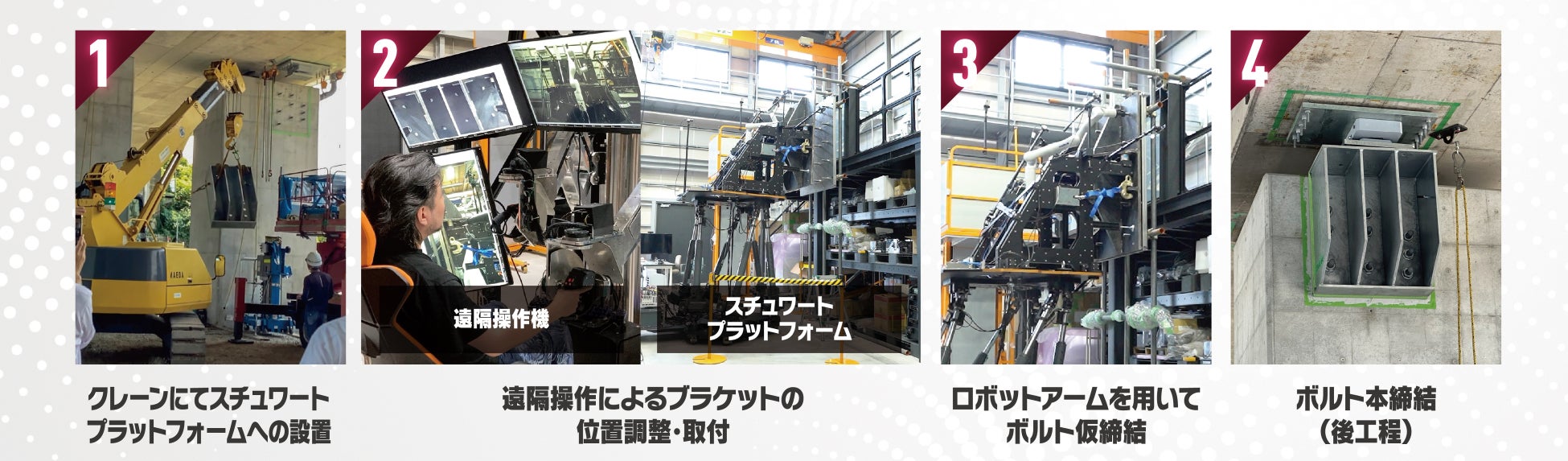

2025 年 10 月のハイウェイテクノフェア 2025 の竹中土木ブースにて「建設用スチュワートプラットフォーム」としてスチュワートプラットフォーム部分を初公開いたしました。また現在は、ラフテレーンクレーンに搭載しての設置高約7m の場所への鋼製ブラケット取付作業の予備試験を進めております。


ナット仮締結システム(ロボットアーム)
バワー増幅バイラテラル制御による遠隔操作・力制御対応の7自由度ロボットアームを搭載。先端の7軸目の無限回転を使用してブラケット取付後のナット仮締結を行ないます。

|
使用製品 |
KINOVA Gen3 / 7DOF |
|
最大リーチ |
902 mm |
|
動作自由度 |
7自由度 |
|
重量 |
約 8.2 kg |
ブラケット把持システム
電磁石によりブラケットの吸着把持と取付後の解除を遠隔操作で行なうシステムを搭載。幅と奥行を任意に調整できる機構を採用し、多様な形状のブラケットにも対応できます。
|
寸法(カメラ部除く) |
W 1,550 × D 1,650 × H 1,100 mm |
|
把持部寸法 |
(最大)1,090 mm |
|
ブラケット把持方式 |
電磁石による吸着 |
スチュワートプラットフォーム(GSP)
天板を支える6本のシリンダが相互に連携することで天板の三次元空間上での位置・姿勢を自在に制御できるロボットです。複数のシリンダで一つの天板を支えるシンプルな構造で、高出力かつ高精度な動きを実現。力と精度が同時に求められる重量物のハンドリングに適しています。
クレーンなどの揚重機械と組み合わせれば、スチュワートプラットフォームの弱点である可動範囲の狭さも解消され、汎用高所作業にも対応。建築・土木分野において、これまでは「吊り下げる」しかなかった重量物のハンドリングに、新たな「下から持ち上げる」ソリューションを提供します。
|
寸法(最小) |
W 1,700 × D 2,010 × H 1,620 mm |
|
重量 |
約 700 kg |
|
可搬重量 |
1,000 kg(※ x, y = 500 mm オフセット時) |
|
可動範囲 |
取付方向 (x):± 700 mm(※ y = 0 mm, z = 100 mm 時) |
|
電動シリンダ単体出力 |
19,600 N |
|
電動シリンダ単体ストローク |
500 mm |
■ iREX2025 での展示内容
人機一体ブースにて、人機 GSP ver.2.0 をタダノ製ラフテレーンクレーンのブームに搭載し、高所での鋼製ブラケット取付作業の実演および解説を実施します。現場での実用を見据えたロボットシステム全体として、ラフテレーンクレーンに取り付けた状態での初公開となります。
※「人機 GSP ver.2.0」以外の iREX2025 展示内容については後日改めてお知らせします。
■ 今後の展望
2026 年中を目標に、鋼製ブラケット取付作業の実現場での実証試験を目指し開発を進めています。その後は、現場への社会実装へ向けて製品化企業の探索と連携を進めてまいります。
■ 参考情報
・関連プレスリリース(2022 年 12 月 28 日)
【資本提携】株式会社人機一体は、株式会社竹中土木と資本提携を行ないました | 人機一体
■ 2025 国際ロボット展 (iREX2025)概要
|
会期 |
2025 年 12 月 03 日(水)〜 06 日(土) |
|
会場 |
東京ビッグサイト |
|
主催 |
一般社団法人 日本ロボット工業会、日刊工業新聞社 |
⇒ 詳細は主催者サイトをご覧ください。
■ 会社概要
株式会社人機一体
代表者 :金岡博士(Dr. KANAOKA)
所在地 :滋賀県草津市青地町648番地1
拠 点 :福島県南相馬市原町区萱浜字巣掛場45番地245
南相馬市産業創造センター
創 立 :2007 年 10 月 01 日
創 業 :2015 年 10 月 01 日(現商号への変更日)
資本金 :1 億円
事業内容:先端ロボット工学技術に基づく新規事業開発支援のための知的財産活用サービス

このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像
