ホイールローダ用の後付け自動運転装置を開発
~発電所燃料の運搬実証実験で、通常の有人操業時と同水準の作業を実現~
株式会社大林組(本社:東京都港区、社長:蓮輪賢治)は、ホイールローダ用の後付け自動運転装置を開発し、グループ会社の大林神栖バイオマス発電株式会社(本社:茨城県神栖市、社長:長瀬有弘)が運営する大林神栖バイオマス発電所(所在地:茨城県神栖市、発電容量:51.5MW)で実証実験を行い、燃料運搬作業の自動運転を実現しました。

1 背景
ショベルカーやダンプトラックなどの建設機械は、建設業のみならず農業、採石業、製造業などでも使用されています。各産業において、労働者不足や長時間労働をはじめとする労働環境の改善など、さまざまな課題を抱えていることから、省人化や生産性向上につながる建設機械の技術開発が活発に行われています。
大林組は、建設現場の省人化・効率化を目的としたロボティクスコンストラクションを推進し、「バックホウ自動運転システム」や「タワークレーンを用いたコンクリート自動運搬システム」などを開発しています。2023年にはバックホウやダンプトラックなどを連携して複数の建設機械の自動・自律運転を行い、ダム建設における盛土作業の自動化に成功するなど、着実に技術開発を進めてきました。
今般、それらの知見を活用してホイールローダ用の自動運転装置を開発し、同発電所にて実証実験を行いました。
2 本装置の特長と実証実験について
(1)ホイールローダのメーカーや機種を選ばず、後付けで容易に自動化が可能
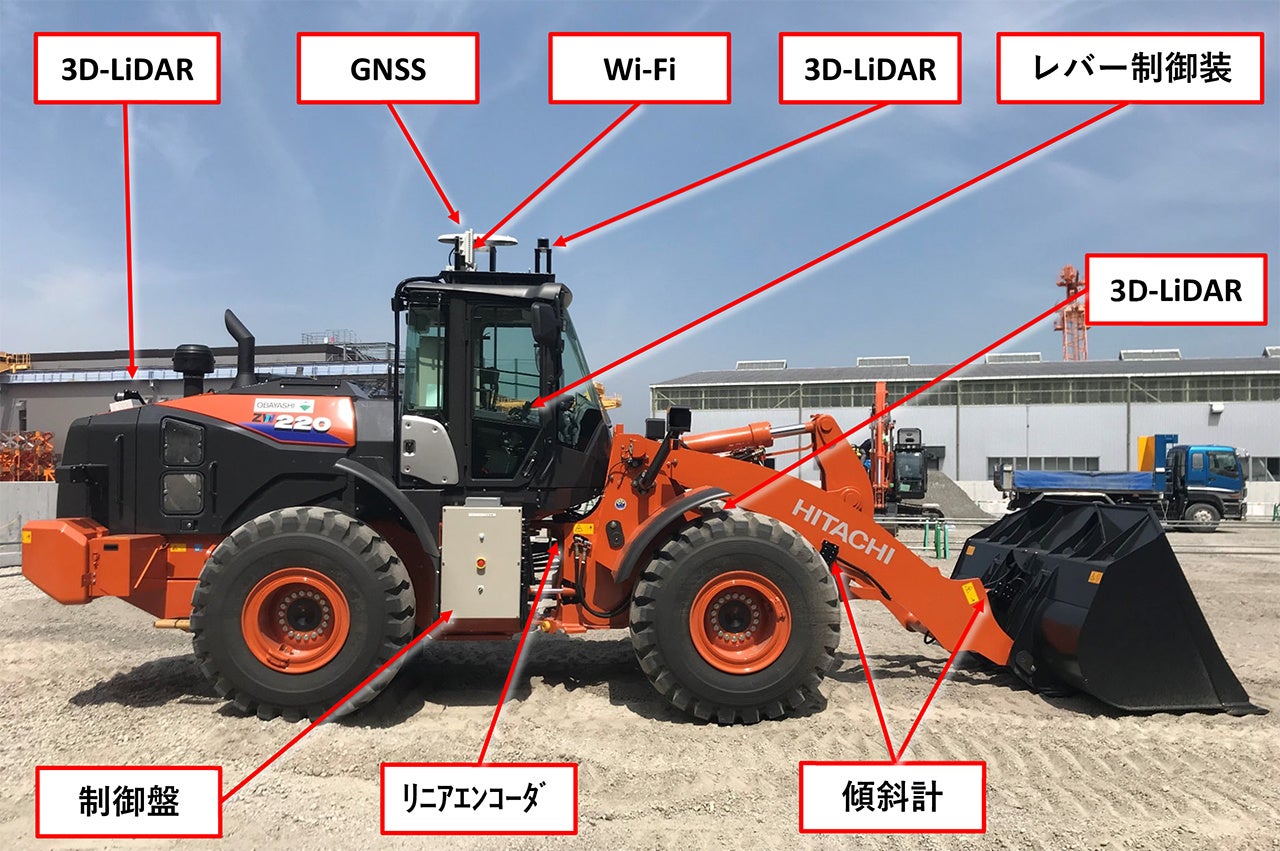
今回開発したホイールローダ用の自動運転装置は自動運転システム、3D-LiDAR(※1)や傾斜計などの各種センサー、自動運転制御盤、レバー制御装置で構成されます。
すくい込み、運搬、積み込み、投入など自動運転に必要な作業設定は、遠隔で安全な場所から行えます。
ホイールローダは各作業場所の位置を認識し、運搬物の形状から効率よくすくい込みができる位置を、各種センサーで、機体の挙動・位置を把握しながら自動的に判断し、作業位置まで走行します。その後は事前に設定した経路で運搬し、積み込みや投入作業を行います。
本装置は、ホイールローダのメーカーや機種を選ばず後付けが可能で、動作設定も作業員の熟練度に関係なく簡単に設定が可能です。また、帳票機能も備えており、積み込みや投入数量なども管理できます。
(2)発電所の安定稼働に必要な投入量135tの運搬を達成
本実証実験ではバイオマス発電の燃料となるPKS(※2)をすくい込み、集積場所から燃料投入口まで運搬、投入するまでの作業を繰り返し、大林神栖バイオマス発電所の安定稼働に必要な135tを約2時間半で投入しました。
また、暗くても感知が可能なセンサーを搭載することで、夜間でも日中と同様に動作することを確認しました。

実証の様子(日中4倍速) (動画再生時間:34秒)
実証の様子(夜間4倍速) (動画再生時間:37秒)
3 今後の展望
ホイールローダ用の本装置は、すくい込み位置と積み込みや投入位置が固定された環境であれば昼夜に関係なく運用が可能であり、採石業やその他の発電施設などでの活用も期待できます。今後も本装置の技術開発を継続することで、作業の省人化や生産性向上に貢献していきます。
大林組は、建設機械の自動運転技術で、建設現場の省人化や生産性向上を推進するとともに、建設業以外の領域にも活用の場を広げることで、さまざまな産業の省人化、生産性向上に貢献していきます。
※1 3D-LiDAR(Light Detection and Ranging)レーザー光を照射して対象物までの正確な距離を測定し、遠方や周辺の状況をリアルタイムかつ立体的な点群データとして認識するセンサー機器
※2 PKSPalm Kernel Shellの略で、パーム椰子の殻の部分で、パーム油を生産する過程で発生する農業物残渣(ざんさ)。大林神栖バイオマス発電所では、主燃料を木質ペレットとし、PKSも利用している
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像